Developing a Self-Driving Car in the CARLA Simulation Platform
Overview
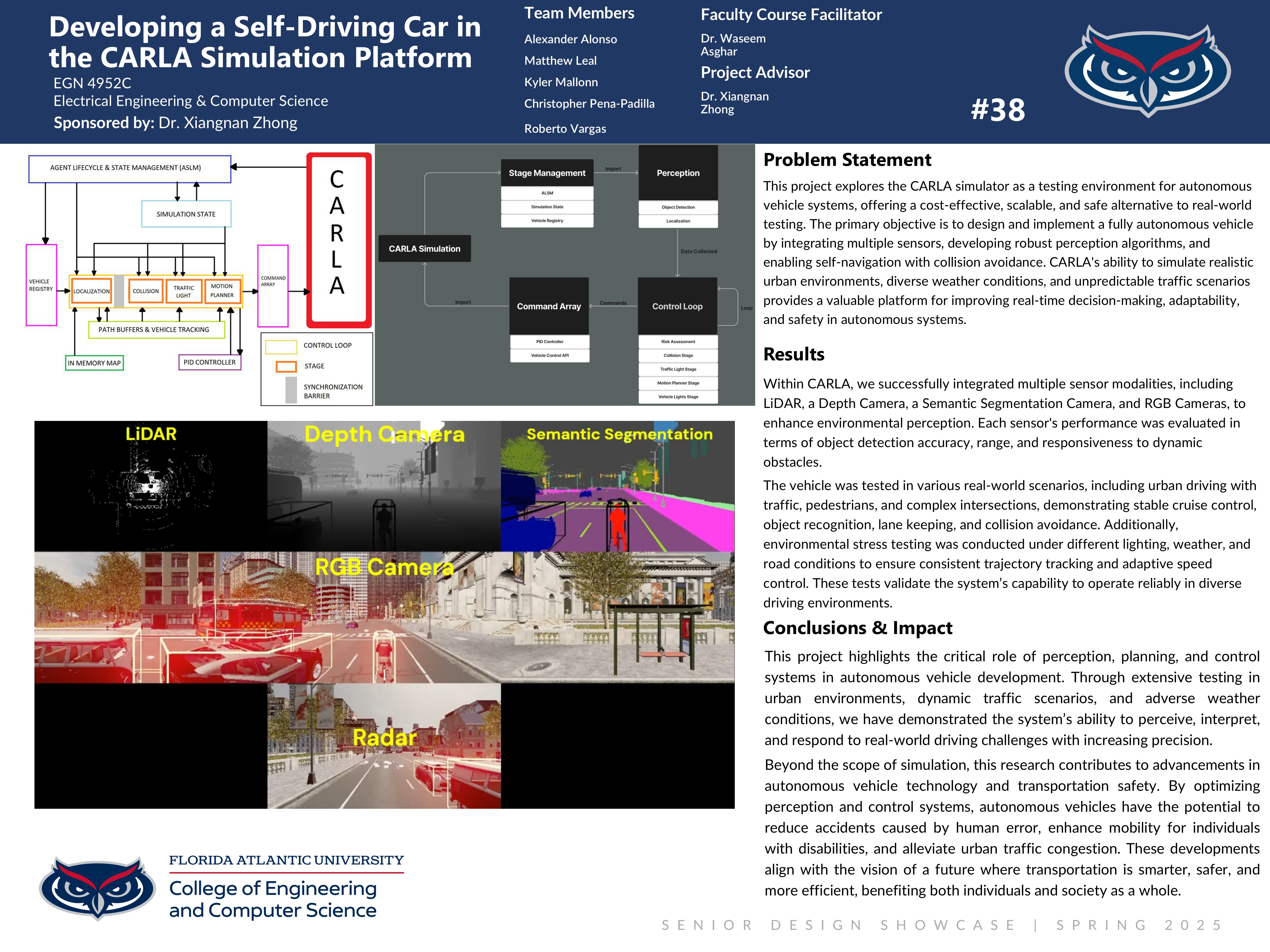
This project aims to design and implement a fully autonomous ‘self-driving’ car within the CARLA simulation platform. The objective is to achieve a high level of autonomy that allows the vehicle to navigate various simulated traffic situations—routine and rare. By performing effectively in both mundane and unique scenarios, our model will display how autonomous cars can consistently respond to unexpected events, avoid human error in ordinary situations, and ultimately improve overall safety on the road.
Community Benefit
The importance of this project lies in its assistance in advancing autonomous driving technologies. It enables the development and testing of autonomous vehicle systems safely and cost-effectively. It also provides an opportunity to address key challenges in autonomous driving, such as real-time decision-making, traffic interactions, and the vehicle's ability to navigate dynamic environments.
Team Members
Sponsored By
Dr. Xiangnan Zhong