Alternative Underwater Foil Actuation
Overview
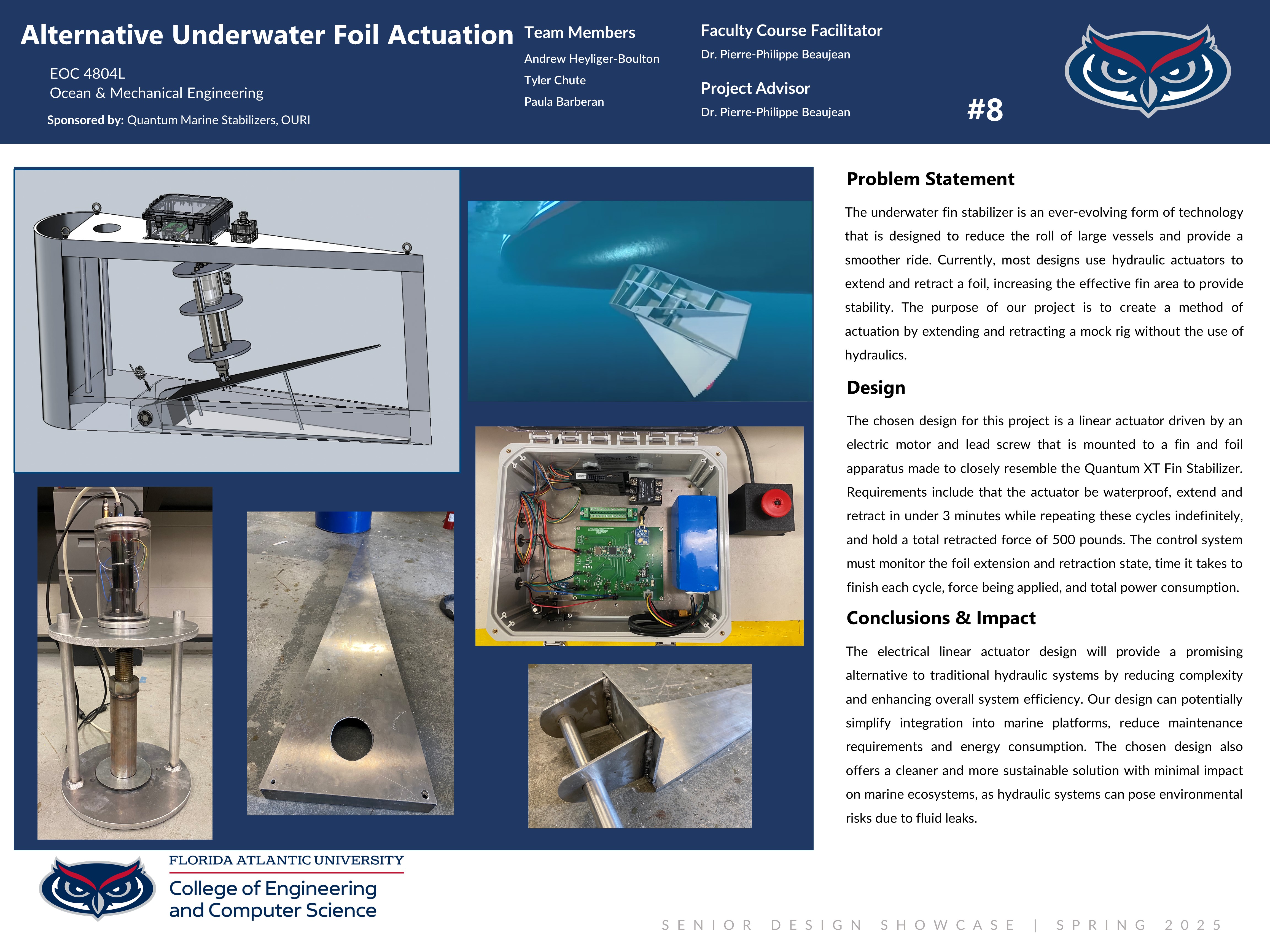
The underwater fin stabilizer is an ever-evolving form of technology that is designed to reduce the roll of large vessels and provide a smoother ride. Currently, most designs use hydraulic actuators to extend and retract a foil, increasing the effective fin area to provide stability. The purpose of our project is to create a method of actuation by extending and retracting a mock rig without the use of hydraulics. The chosen design for this project is a linear actuator driven by an electric motor and lead screw that is mounted to a fin and foil apparatus made to closely resemble the Quantum XT Fin Stabilizer. Requirements include that the actuator be waterproof, extend and retract in under 3 minutes while repeating these cycles indefinitely, and hold a total retracted force of 500 pounds. The control system must monitor the foil extension and retraction state, time it takes to finish each cycle, force being applied, and total power consumption.
Community Benefit
By eliminating the use of hydraulic systems, this design reduces the risk of hydraulic oil from the actuator to leak into the ocean environment and compromise the mechanical system. Additionally, the implementation of a reliable, low-maintenance electric linear actuator enhances the safety and comfort of passengers and crew aboard large vessels. Smoother rides result in improved working conditions for maritime workers, reduced motion sickness for travelers, and safer transport of cargo.
Team Members
Sponsored By
Quantum Stabilizers & the FAU Office of Undergraduate Research and Inquiry (OURI)