Intelligent and Collaborative Autonomous Robots for Real-Time Application
Overview
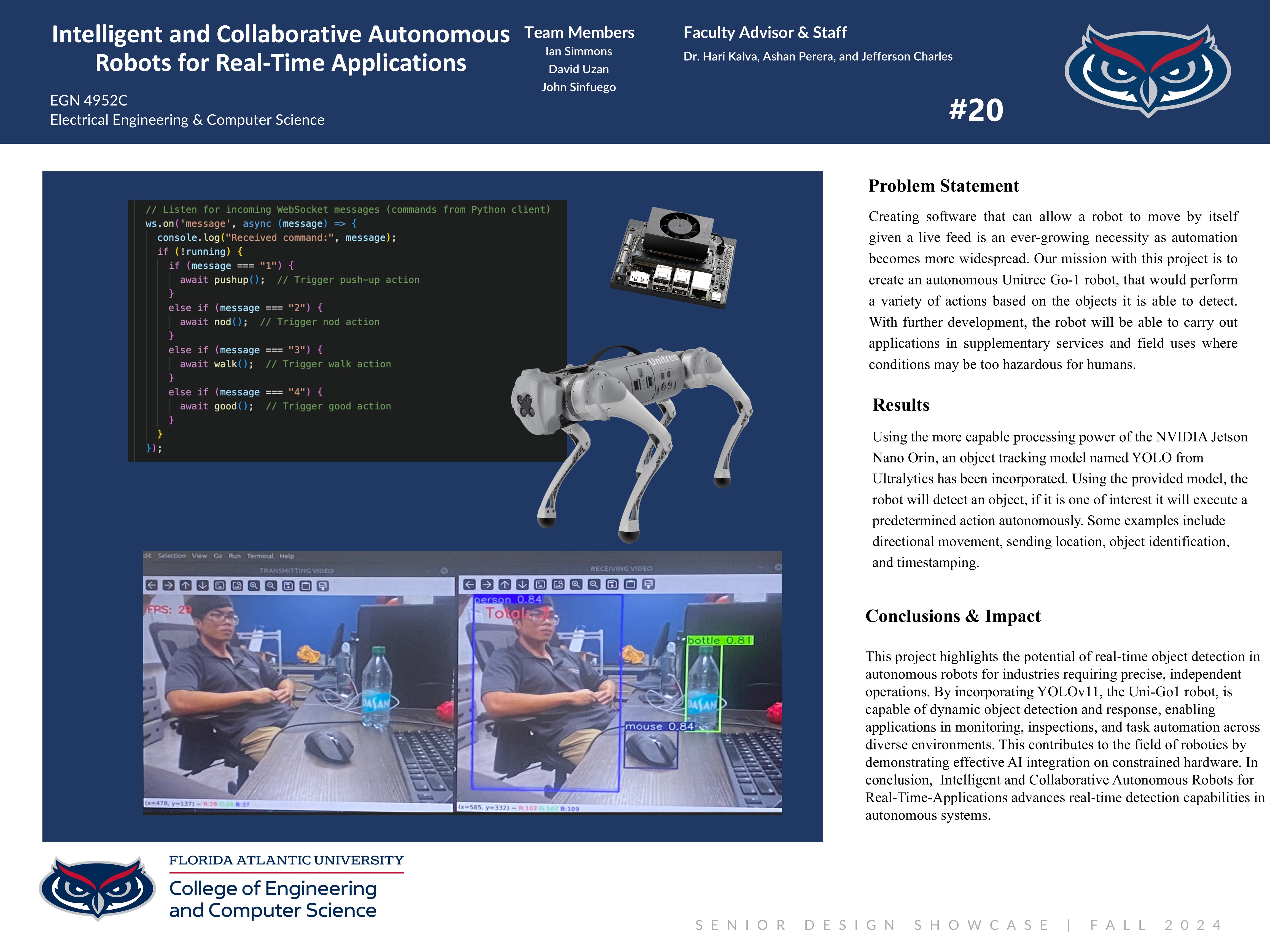
Our project revolves around an autonomous Unitree-Go1 robot dog, which is equipped with 5 cameras and having seamless complex movement. We integrated object detection technology through the Unitree-Go1, applying the YOLO libraries from Ultralytics to allow for real-time computation onboard. With the integration of our Python code, the integrated cameras, and applying deep learning knowledge, the robot will be able to navigate different environments and perform a wide-range field-based tasks based on the detected object's accuracy level calculated within itself.
Community Benefit
One of our main efforts is to make the Unitree-Go1 able to help in rescue efforts in time of extreme weather. Detecting and differentiating people from their surroundings is a great necessity when it comes to recovery time as every second counts.
Team Members
Sponsored By
Multimedia Systems Lab, Ashan Perera, Jefferson Charles