Multi-Robot Navigation and Goal-Seeking
Overview
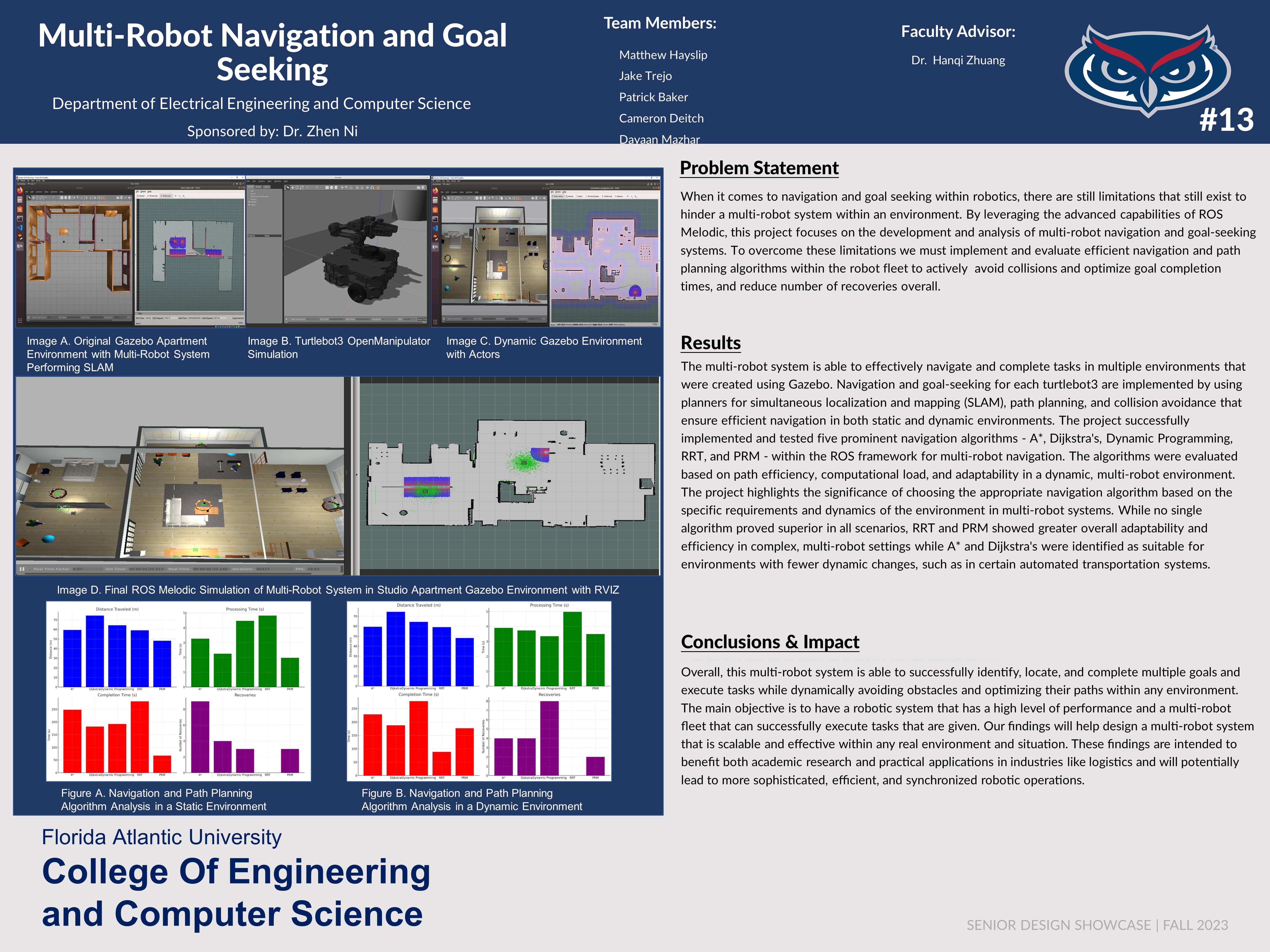
When it comes to navigation and goal seeking within robotics, there are still limitations that still exist to hinder a multi-robot system within an environment. By leveraging the advanced capabilities of ROS Melodic, this project focuses on the development and analysis of multi-robot navigation and goal-seeking systems. To overcome these limitations we must implement and evaluate efficient navigation and path planning algorithms within the robot fleet to actively avoid collisions and optimize goal completion times, and reduce number of recoveries overall.
Team Members
Sponsors
Dr. Zhen Ni