NASA RASSOR ROVER
Overview
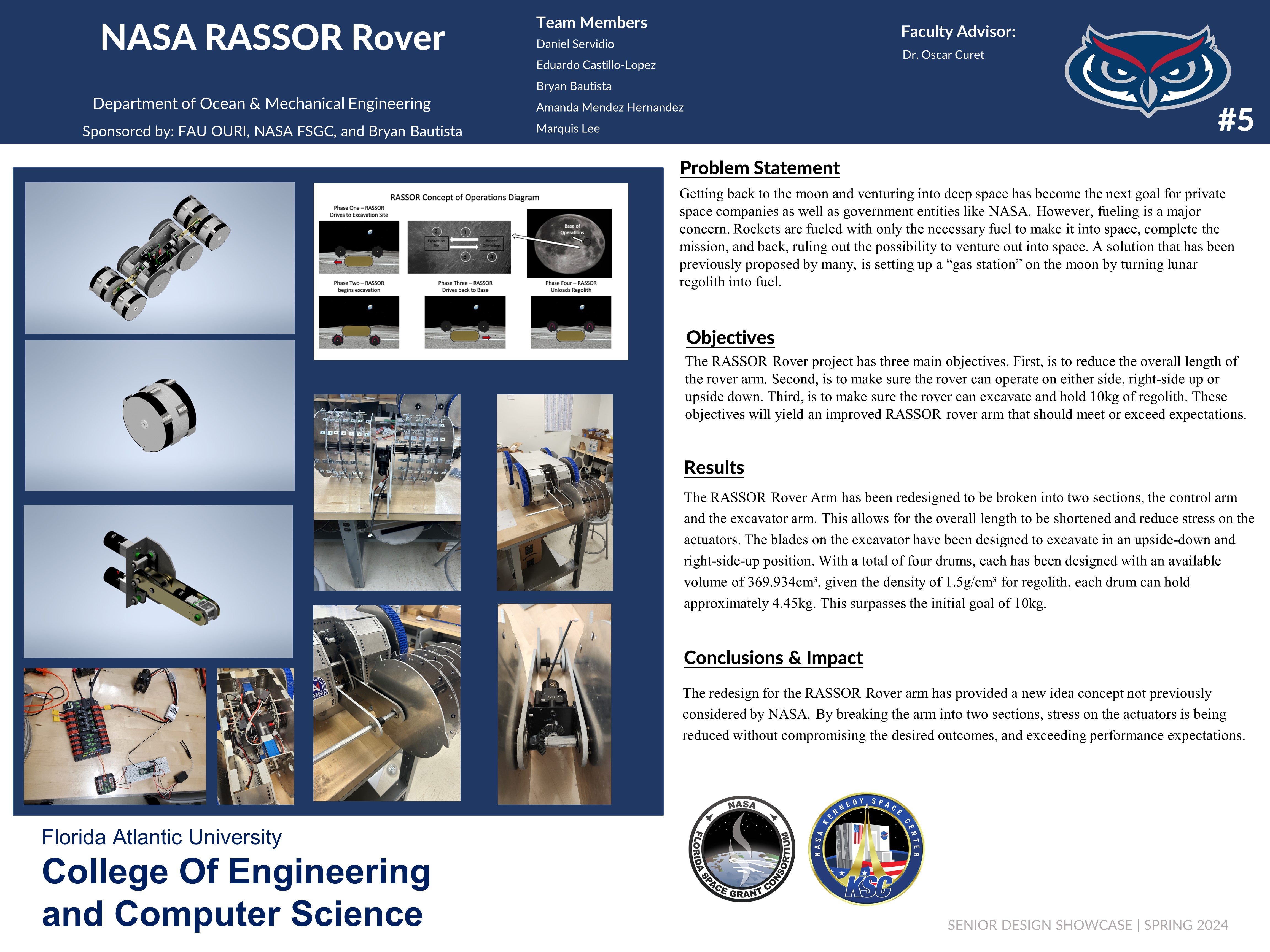
Space Exploration and eventual colonization of other celestial bodies such as the Moon and Mars present a set of many unique challenges. One of these challenges is the sustainable extraction and utilization of in-situ resources that are present on these celestial bodies. Traditional methods of transporting supplies from the Earth to support these bases are not only
costly but logistically complex. The Regolith Advanced Systems Operation Robot (RASSOR) Rover is an excavator robot that is engineered to tackle these challenges by providing a viable solution to the autonomous mining of regolith, which can then be processed to extract essential resources such as water, oxygen, and potentially even fuel. This rover must be capable of operating in harsh environments including extreme temperatures, uneven terrain, and even upside down. This rover can prove to be the cornerstone of future space exploration and colonization missions.
Community Benefit
The development of the RASSOR rover provides many added benefits not only in technical advancement; but paves the way for future developments in robotics, sustainability, and international collaboration. The technologies developed by the RASSOR Rover open the doors to future iterations of excavating and remote-controlled robots. These robots may be further developed to tackle issues on Earth as well such as disaster relief, mining, and construction in inaccessible or hazardous areas. When it comes to sustainability, by enabling the use of in-situ resources, the RASSOR allows for sustainable, long-term human presence on other celestial bodies more feasible; reducing the dependence supply missions from Earth and reducing costs. Finally, the global significance of space exploration fosters international cooperation in scientific research and technological development. This rover can be further developed and improved by fellow researchers to be more efficient and enhance its capabilities.
Team Members
Sponsored By
OURI
NASA (Florida Space Grant Consortium)