Development of a Self-Driving Car Simulation
Overview
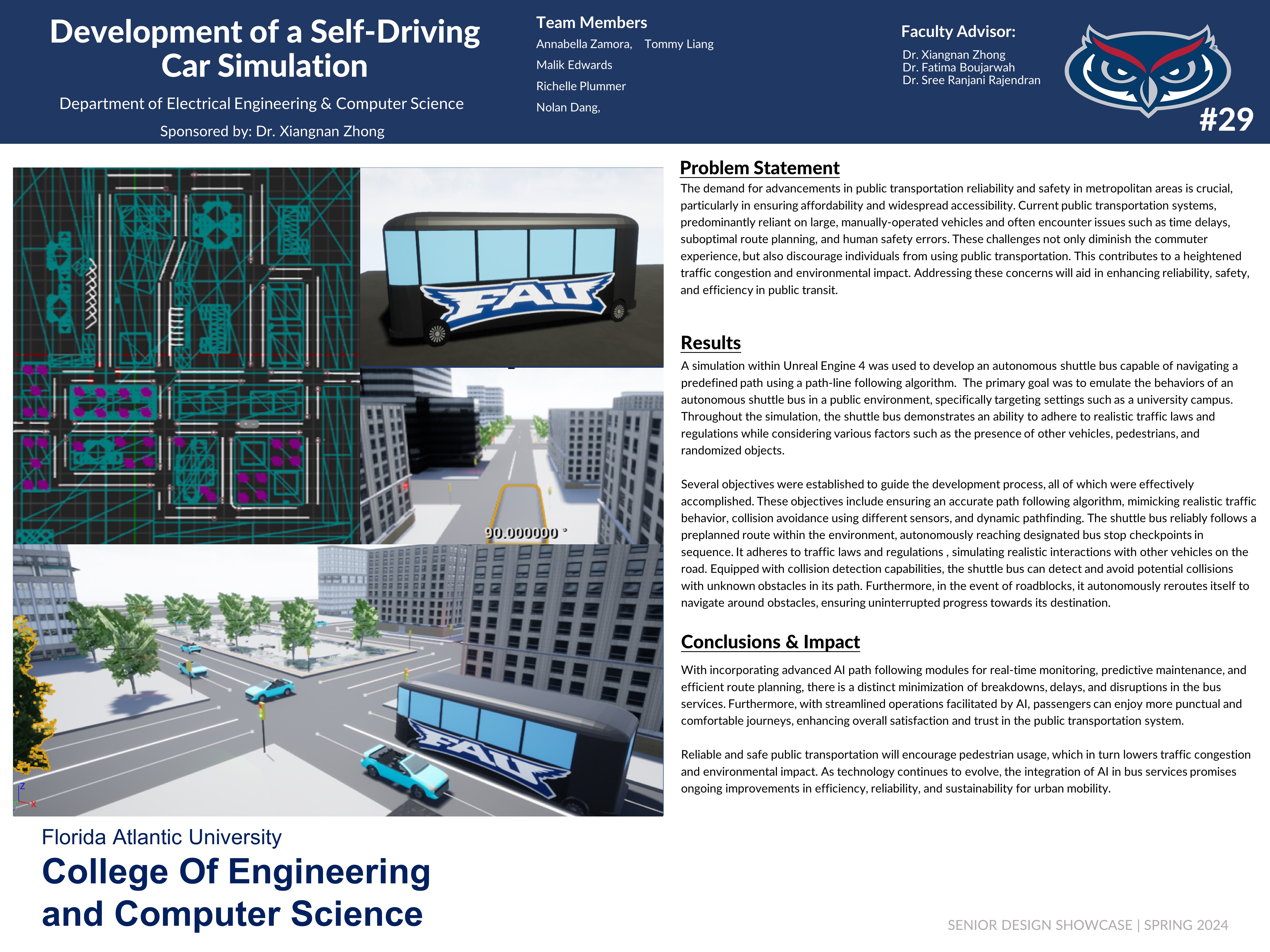
The goal of this project is to realistically simulate the behaviors of a autonomous shuttle bus in a public metropolitan environment. The physics engine simulation will consider factors such as weather patterns, other vehicles, pedestrians, and other randomized obstacles.
The objectives of the project are as follows:
1. Accurately follow a predesignated route throughout the environment and reach various bus stop check points sequentially.
2. Follow realistic traffic laws and regulations
3. Break and/or deter itself from potential collisions with unknown obstacles.
4. In case of road blockage, it will be able to reroute a new path in order to reach its next goal point
Community Benefit
There is a growing need for advancements in public transportation reliability and safety in metropolitan areas in an affordable and widely accessible manner. Current public transportation systems include large, man-operated vehicles that can leave room for time delays, suboptimal route planning, and human safety errors. Man-operated vehicles are less-than-optimal for commuter experience and may deter individuals from relying on public transportation, leading to increased traffic congestion and environmental impact. By incorporating advanced AI path following algorithms for real-time monitoring, predictive maintenance, and efficient route planning, the aim is to minimize breakdowns, delays, and disruptions in the bus services. Reliable and safe public transportation will encourage pedestrian usage, which in turn lower traffic congestion and environmental impact.
Team Members
Sponsored By:
- Dr. Xiangnan Zhong