Autonomous Underwater Vehicle with Subsea Cable Surveying Capabilities
Overview
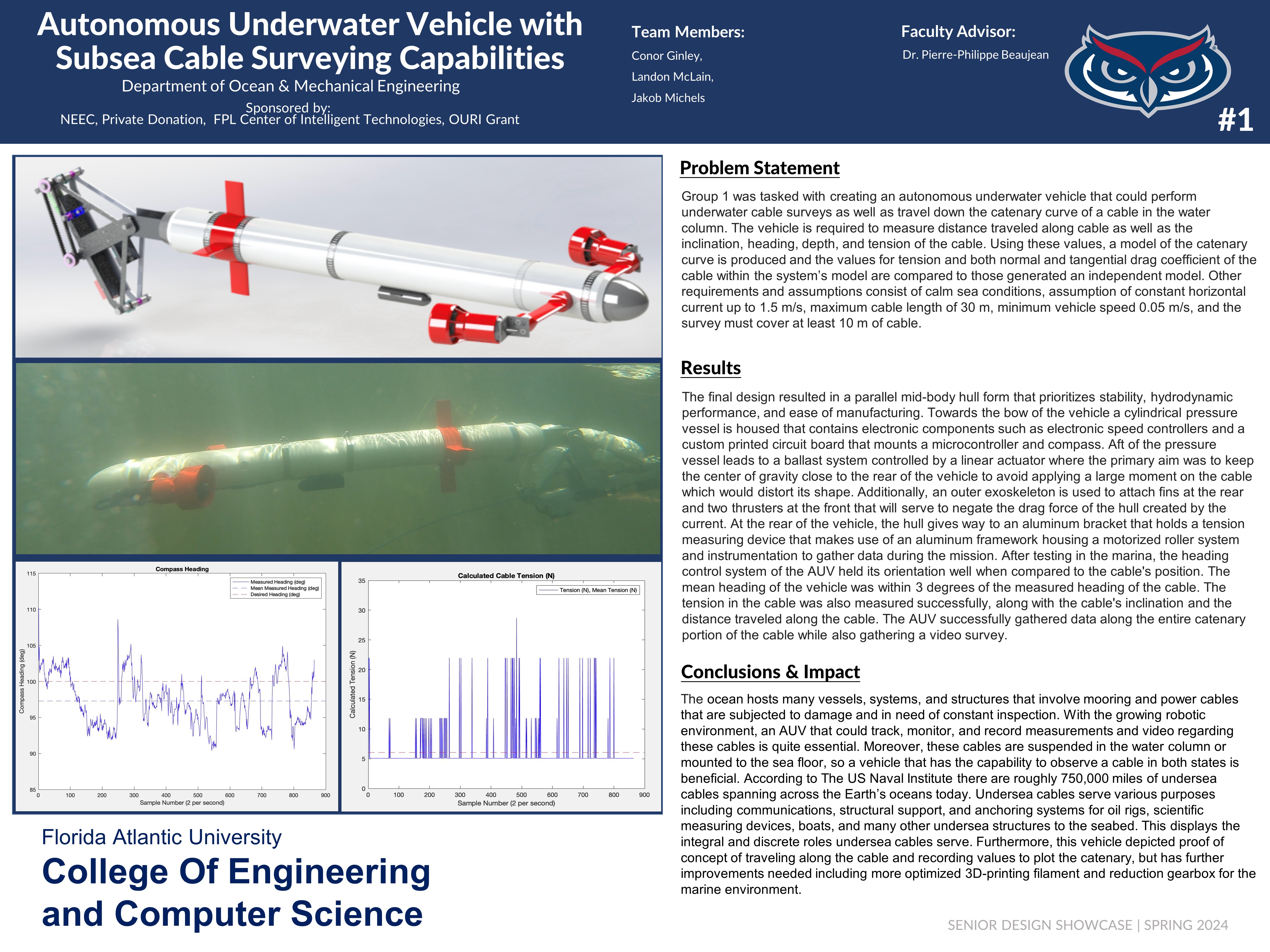
Group 1 was tasked with creating an autonomous underwater vehicle that could perform underwater cable surveys as well as travel down the catenary curve of a cable in the water column. The vehicle is required to measure distance traveled along cable as well as the inclination, heading, depth, and tension of the cable. Using these values, a model of the catenary curve is produced and the values for tension and both normal and tangential drag coefficient of the cable within the system’s model are compared to those generated by an independent model. Other requirements and assumptions consist of calm sea conditions, assumption of constant horizontal current up to 1.5 m/s, maximum cable length of 30 m, minimum vehicle speed 0.05 m/s, and the survey must cover at least 10 m of cable.
Community Benefit
The ocean hosts many vessels, systems, and structures that involve mooring and power cables that are subjected to damage and in need of constant inspection. With the growing robotic environment, an AUV that could track, monitor, and record measurements and video regarding these cables is quite essential. Moreover, these cables are suspended in the water column or mounted to the sea floor, so the vehicle needs to have capability to observe a cable in both states. According to The US Naval Institute there are roughly 750,000 miles of undersea cables spanning across the Earth’s oceans today. Undersea cables serve various purposes including communications, structural support, and anchoring systems for oil rigs, scientific measuring devices, boats, and many other undersea structures to the seabed. This displays the integral and discrete roles undersea cables serve. Furthermore, three final tests will be used on this vehicle in April 2024, separating the seabed, catenary, and overall mission.
Team Members
Sponsored By
National Enginering education Consortium - NEEC
FPL
OURI
Private Donation