Surface Vessel for Water Sampling with Modular Water Sampling Payload
Overview
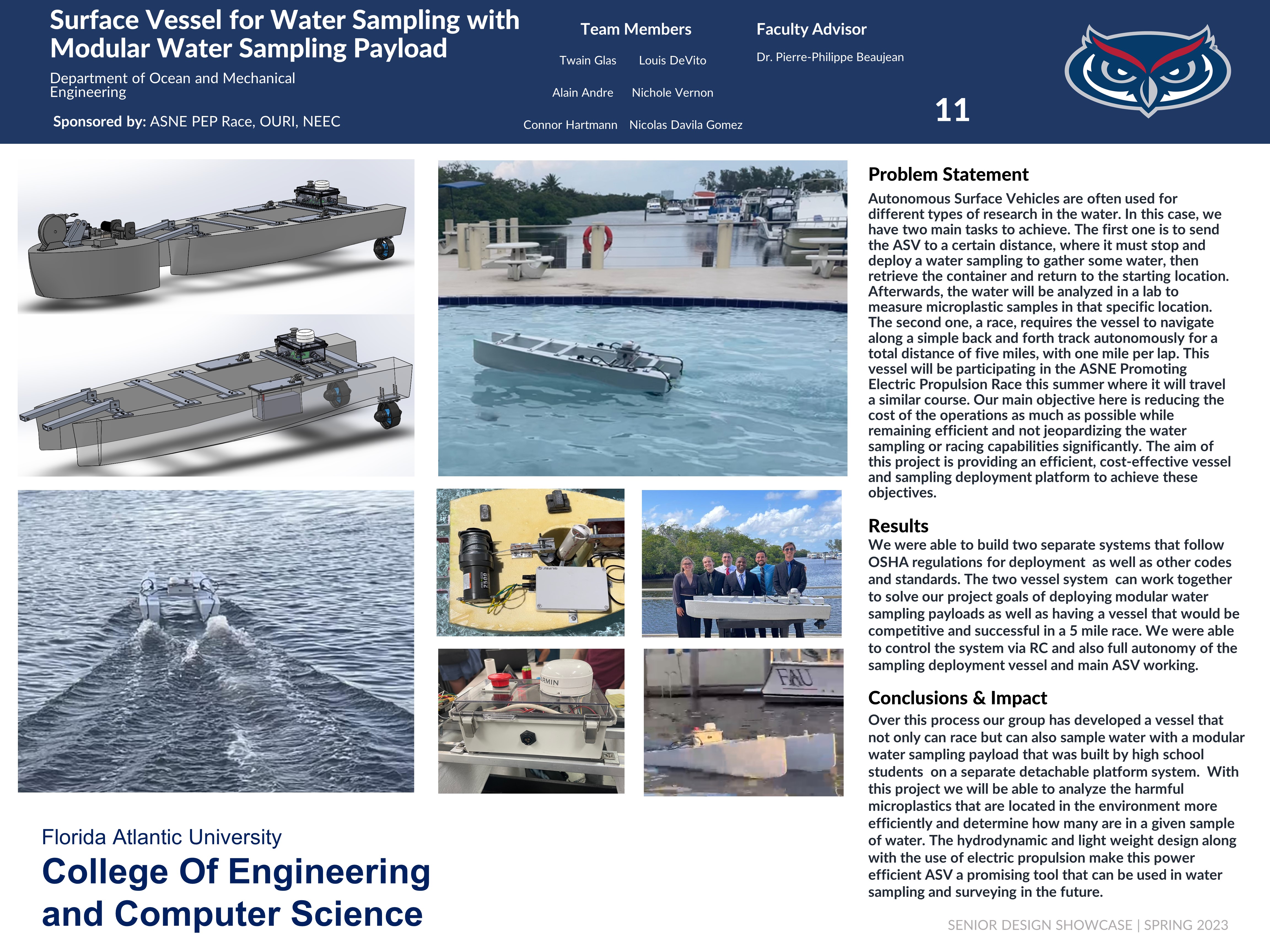
Autonomous Surface Vehicles are often used for different types of research in the water. In this case, we have two main tasks to achieve. The first one is to send the ASV to a certain distance, where it must stop and deploy a water sampling to gather some water, then retrieve the container and return to the starting location. Afterwards, the water will be analyzed in a lab to measure microplastic samples in that specific location. The second one, a race, requires the vessel to navigate along a simple back and forth track autonomously for a total distance of five miles, with one mile per lap. This vessel will be participating in the ASNE Promoting Electric Propulsion Race this summer where it will travel a similar course. Our main objective here is reducing the cost of the operations as much as possible while remaining efficient and not jeopardizing the water sampling or racing capabilities significantly. The aim of this project is to provide an efficient, cost-effective vessel and sampling deployment platform to achieve these objectives.
Community Benefit
With this project we will be able to analyze the harmful microplastics that are located in the environment more efficiently and determine how many are in a given sample of water. The hydrodynamic and light weight design along with the use of electric propulsion make this power efficient ASV a promising tool that can be used in water sampling and surveying in the future.
Team Members
- Twain Glas - tglas2020@fau.edu
- Louis DeVito - ldevito2019@fau.edu
- Alain Andre - aandre2017@fau.edu
- Nichole Vernon - nvernon2019@fau.edu
- Connor Hartmann - chartmann2019@fau.edu
- Nicolas Davila Gomez - gomezn2019@fau.edu
Sponsors
ASNE PEP Race, OURI, NEEC