Leader-Follower Formation Control Using Vision and Radio Sensors for Mobile Robotic Networks
Department of Electrical Engineering and Computer Science
Overview
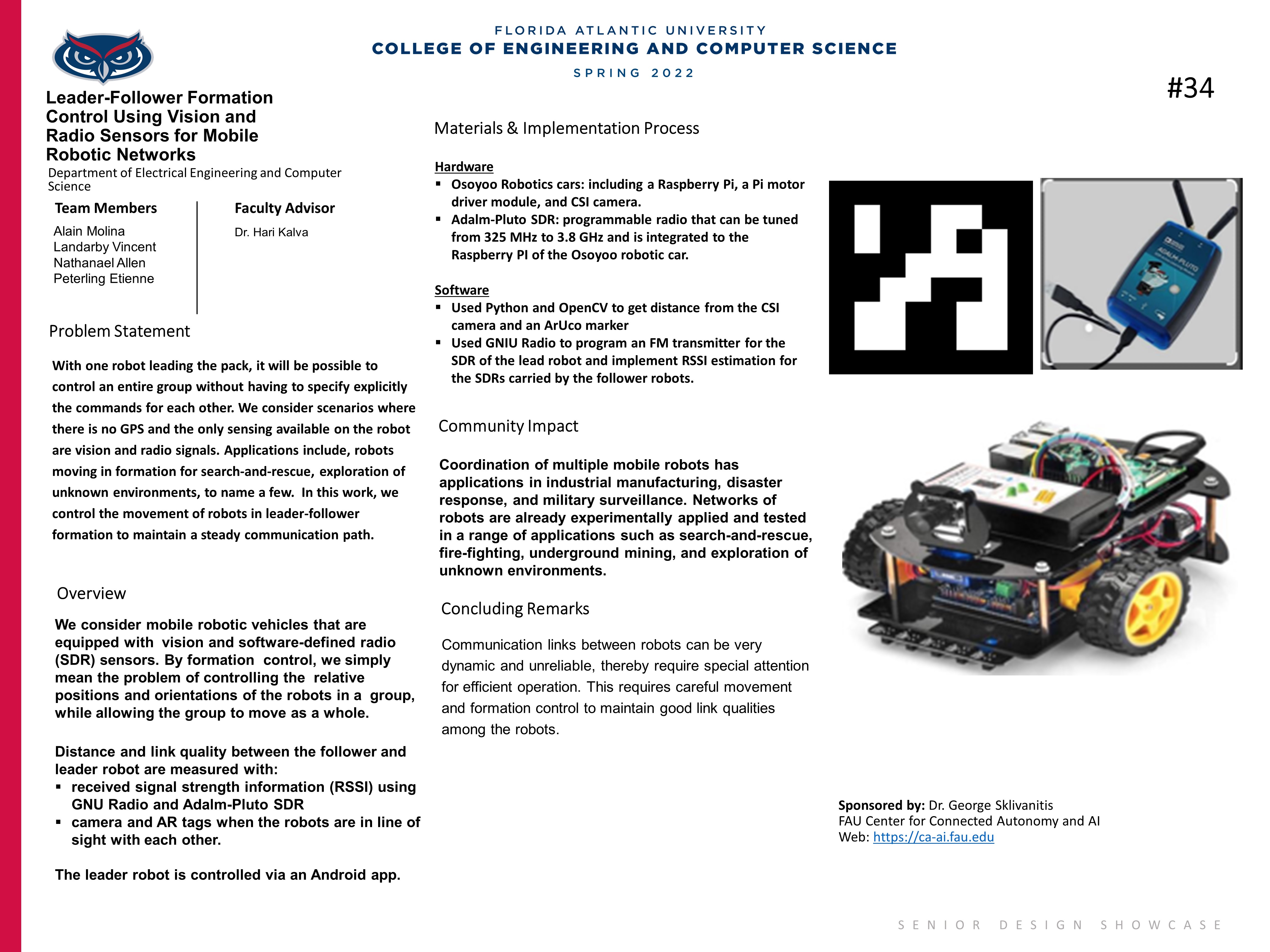
We consider the case of leader-follower formation of mobile robotic vehicles equipped with vision and software-defined radio sensors. By formation control, we simply mean the problem of controlling the relative positions and orientations of the robots in a group, while allowing the group to move as a whole. We consider scenarios where there is no global positioning system, and the sensing modalities are vision and radio signals. We build and demonstrate formation control to maximize wireless network coverage with three to five car-like robots that move as a team to maintain link connectivity between any pair of nodes in the network of robots. Distance and link quality between the robots are measured with received signal strength information (RSSI), omnidirectional cameras and augmented reality tags when the robots are in line of sight with each other. The leader robot is controlled via an Android application. The follower robots use visual information from an on-board camera and calculate RSSI with GNU Radio software from an Adalm-Pluto software-defined radio.
Community Benefit: Coordination of multiple mobile robots has applications in industrial manufacturing, disaster response, and military surveillance. Networks of robots are already experimentally applied and tested in a range of applications such as search-and-rescue, firefighting, underground mining, and exploration of unknown environments. Communication links between the robots in such scenarios can be very dynamic and unreliable, thereby require special attention for efficient operation. This requires careful movement and formation control to maintain good link qualities among the robots.
Team Members
Sponsor
FAU Center for Connected Autonomy and AI