Wave-Powered ASV
Abstract
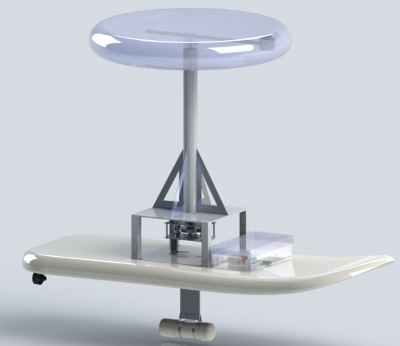
The project objective is to develop an autonomous vehicle capable of harnessing, storing and measuring the energy from 0.3m to 1m wave height waves, and traveling 200 m to a waypoint within 5m of accuracy, then completing a round trip back to its initial position within 5m of accuracy. The finished vehicle has a windsurf board base. It has a super structure composed of a rotating shaft. The bottom section of the superstructure housing is composed of two electric DC generators connected to a 1:10 gear box. This housing also has a linear actuator disc brake that stops the rotating shaft from spinning. Moreover, the system is composed of a keel pipe capable of having adjustable lead weight for stabilizing the vehicle in constant wave motion. The vehicle is made up of an RF communication system (Xbee), energy storing and measuring system (current sensor and 12V lead acid battery), navigation system (OS5000 compass, MTK3339 Adafruit GPS module, and two T100 thrusters), data logging system (SD card), and health monitoring system (TC1047 temperature sensor and voltage ADC reader on the Arduino DUE).





