Bio-Inspired AUV
Abstract
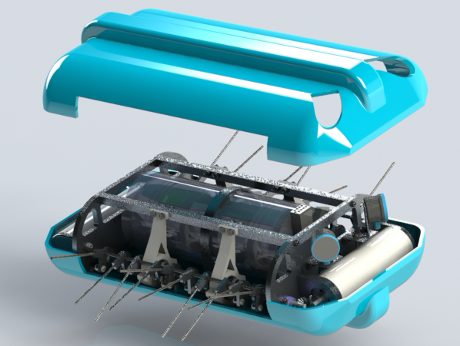
Evolution of animals is still superior in many ways to human built machines. In order to continue advancing technology it can be useful to mimic the physical aspects of animals. Marine undulating fins, or marine animals who are propelled by waves in a sinusoidal shape, are one of these areas of interest. This senior design project is a prototype which takes elements from marine life which utilize undulating fins as its primary propulsion method, in order to accomplish a series of tasks. The prototype is an autonomous underwater vehicle, or AUV, that is tasked to move forwards and backwards at ½ body length per second, maintain a given depth between zero to three meters, detect and avoid collision against a wall, and to station keeping while in a current between 0-20cm/s. To accomplish these missions, the AUV utilizes two independent crankshafts to provide undulating fin propulsion, two Blue Robotics acoustic pingers to provide the awareness of surroundings necessary to complete obstacle avoidance and station keeping tasks, and a ballast system for depth control.





