Autonomous Anchor Surface Vessel (AASV)
Abstract
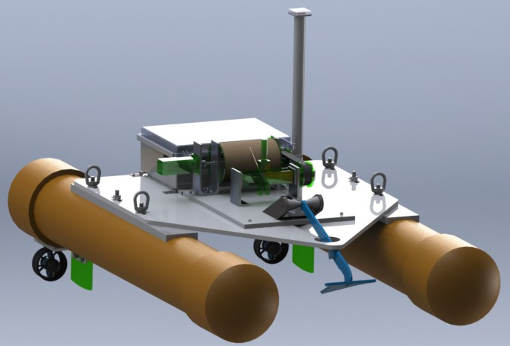
Autonomous Surface Vessels (ASVs) often perform operations away from any dock where it’s necessary to maintain position for a certain amount of time. In the presence of high winds and/or strong currents, the station keeping capability is time-limited due to the finite amount of energy stored in the batteries. This project assessed the feasibility of a Self-Anchoring ASV that would provide a low energy alternative to current station keeping strategies. Six senior Ocean Engineering students have designed, fabricated, and tested an ASV capable of traveling to GPS coordinates, deploying an anchor, monitoring its position for a fixed amount of time, and retrieving the anchor. Potential applications of this technology involve scientific missions, such as autonomous environmental monitoring drones, and defense industry operations.





