Bio-inspired Robotics Lands FAU Professor $500,000 NSF CAREER Award
by Gisele Galoustian | Thursday, Apr 26, 2018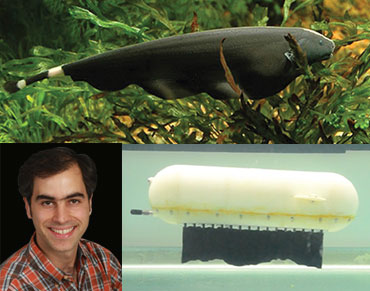
Bio-inspired Fin Will Enhance Ocean Exploration and Defense
Mimicking the seamless motion of how fish swim and use their fins to maneuver their way within the ocean depths has landed an engineering professor at Florida Atlantic University with a prestigious $500,000 National Science Foundation (NSF) CAREER award. Oscar M. Curet, Ph.D., an assistant professor in FAU’s Department of Ocean and Mechanical Engineering in the College of Engineering and Computer Science, has been observing animals in nature and has developed bio-inspired flexible structures that increase maneuverability and enhance the motion of underwater vehicles and robotic systems.
Cooperative multi-agent underwater systems are fundamental for ocean exploration and defense, yet knowledge of their dynamics and hydrodynamic interaction in performance and maneuvers still remains unclear. In this five-year project, Curet will investigate this concern using bio-inspired underwater vehicles and a novel robotic undulating fish fin he developed.
“This is a tremendous accomplishment for Professor Curet who is an up-and-coming scientific and academic leader who truly exemplifies the role of teacher and scholar,” said Stella N. Batalama, Ph.D., dean of FAU’s College of Engineering and Computer Science. “His ability to integrate his research with K to 12, undergraduate and graduate education will further our University’s mission and moreover, inspire students to pursue careers in engineering and science.”
Although current autonomous underwater vehicles (AUVs) have many capabilities, one main limitation is their inability to perform precise station-keeping, which allows the vehicle to hold its position and adjust for currents and other external forces that would otherwise result in the vehicle drifting out of position. They also have limited maneuverability, which limits their operation in complex environments. At low speeds, the effectiveness of propellers for generating thrust diminishes, making it difficult for propeller-powered vehicles to keep station or navigating at low speed.
Bio-inspired propulsors can be an alternative to overcome these limitations since they excel in maneuverability and exploit hydrodynamic interactions to improve efficiency. To develop these propulsors requires a comprehensive understanding of hydromechanics, maneuver control and performance.
For this project, Curet will use an array of bio-inspired underwater vessels propelled with the undulating fin prototype he developed. He adapted the suppleness of fish fins in this flexible prototype to respond the same way nature does – a far departure from rigid structures and materials currently used for many engineering products.
“The great potential of a single undulating fin to control the six-degree of freedom of an underwater vessel has remained elusive, in part due to the lack of a platform that allows studying the dynamics in free-swimming conditions,” said Curet. “Understanding the dynamics, performance and fluid around this new prototype will allow us to develop and control a new generation of highly maneuverable vessels propelled by undulating fins.”
There also is an important educational need to enhance the engineering curriculum with multidisciplinary classes at the intersection of robotics, fluid mechanics and bio-mimetics as well as diversifying the cadre of engineering students.
“The multidisciplinary nature of Professor Curet’s research, which include robotics, fluid mechanics, design, 3D printing and programming will excite and attract young students from diverse backgrounds in the area of STEM and give them hands-on experience,” said Javad Hashemi, Ph.D., associate dean for research, interim chair of the Department of Ocean and Mechanical Engineering, and a professor in FAU’s College of Engineering and Computer Science. “Furthermore, the bioengineering module that is being developed will be used by teachers in elementary and high school labs.”
Curet’s long-term career objective is to become an academic leader in the area of bio-mimetic systems with a focus on marine propulsion and applications in multi-agent robotics, ocean exploration and coastal preservation.