Ocean Engineering and Technology Projects

Scientists know that many marine reef fish gather in high densities for mass spawning at precise locations and times – usually at sunset and after – but little is understood about fish behavior during these events and how environmental conditions affect them. The challenge is that these fish spawning aggregations (FSA) have proven difficult to observe: It’s usually hard to know precisely where and when they’re going to occur, and they tend to happen at night. Another complication is the prohibitive cost of conducting surveys by ship. Nevertheless, the fact that FSAs are how these species reproduce and survive means that knowing more about them can be invaluable to conservation efforts by fisheries scientists and regulators.
Click here to see an interesting video about this phenomenon and its role in the sustenance of fisheries.
Recent studies on vocalizations produced by some grouper species during spawning have provided a potential new way to help scientists locate and study FSAs: sound. With funding from the Harbor Branch Oceanographic Institute Foundation, the research team will investigate mobile methods for passive acoustic detection and monitoring of FSAs.
![]()
Principal Investigator: Fraser Dalgleish, Ph.D.
Co-Principal Investigators: Laurent Chérubin, Ph.D., Bing Ouyang, Ph.D.

Underwater video observation of interactions between marine life and marine hydrokinetic devices (MHK) is currently accomplished with optical or acoustical cameras. Traditional optical cameras are most effective in conditions of high ambient light and low turbidity. Even the most sophisticated commercially-available underwater camera technologies require significant artificial white light to effectively image objects that are located at distances of less than 5 m in low light conditions. However, this approach is not desirable for MHK monitoring because artificial light can alter the behavior of the animals being monitored. Furthermore, when conducting surveillance with camera technology, it is necessary to acquire data and perform processing continuously, which translates to high power and bandwidth demands. Nevertheless, high-resolution contrasted scene descriptions are critical for object classification and detailed observations, underscoring the need for low power, low cost, low bandwidth, unobtrusive optical imaging approaches to be developed.
The approach we are developing is known as an Unobtrusive Multi-static Serial LiDAR Imager, an underwater distributed LiDAR system that preserves the advantages of traditional optical and acoustic solutions while overcoming the disadvantages of MHK environmental monitoring applications by producing an omnidirectional, volumetric video stream. The experimental work has included tank testing in the Ocean Visibility and Optics lab extended range underwater imaging facility with 2D/3D moving and stationary targets. The test facility provides an environment where the turbidity (scattering) can be controlled using scattering agent with well-defined optical and physical properties, and the infrastructure allows flexible and accurately characterized transmitter-receiver-target configurations.
Principal Investigators: Fraser Dalgleish, Ph.D., Gabriel Alsenas, Bing Ouyang, Ph.D.
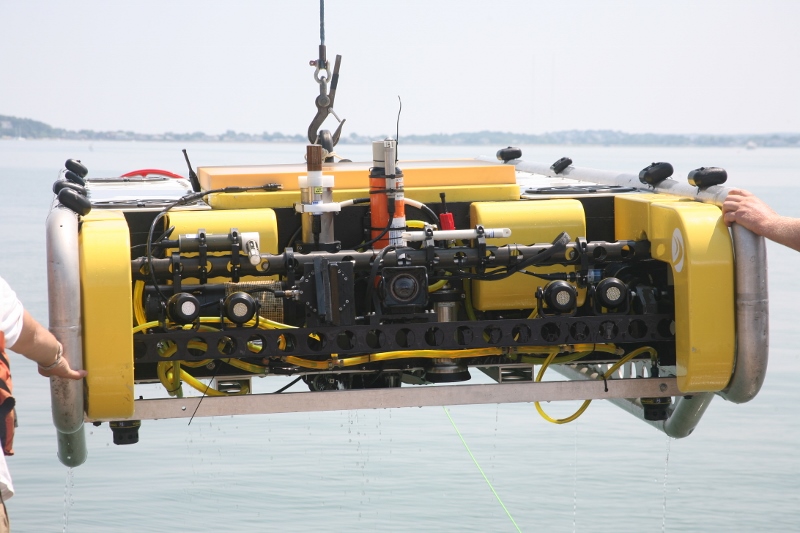
Knowledge of the deep coral habitat, ecology and living environment remains limited because of the constraints of the technology used to map benthic habitats and to measure critical biological and chemical parameters of the species and the environment. Traditional methods for mapping deep coral habitats include manned submersibles, remotely operated vehicles (ROVs), and autonomous underwater vehicles (AUVs) such as gliders. We are working to adapt an entirely new technology for benthic mapping capability: the Bluefin U-4000, an innovative ROV/AUV hybrid that can operate both in a conventional fully autonomous mode and a supervised autonomy mode using a fiber optic tether. It is sized and powered to operate in strong currents, an extremely important feature for our work in the Florida Current, and can support several additional sensor systems. Coupled with its ability to operate in a supervised mode and to hover, the U-4000 could be transformational in underwater vehicle technologies.

The U-4000 will be outfitted with an HD camera, a wide-angle piloting camera, and a number of biological-chemical sensors including high-resolution pCO2 and pH sensors. This will allow us to collect fine-scale environmental data and habitat information for better understanding the living conditions and physical-biogeochemical processes associated with these precious marine resources. Initial dives will be conducted at the Oculina reefs off Florida’s east coast at depths of 70 m to 100 m. The long-term goals of this work are 1) to establish a southeast US autonomous vehicle test bed, 2) to develop an underwater autonomous platform and a sensing package that can effectively survey and monitor the critical deep coral habits, and 3) to understand the health and ecosystem dynamics of deep corals.
Principal Investigators: Fraser Dalgleish, Ph.D., Bing Ouyang, Ph.D., Mingshun Jiang, Ph.D.