Development of a Wireless Remotely Operated Underwater Vehicle
By: Batsheva Gil, Connor Rieth, and Oriana Matney
Mentor: Dr. Georgios Sklivanitis
Lab Researchers: Solomon Markowitz, Parker Wilmoth
Background
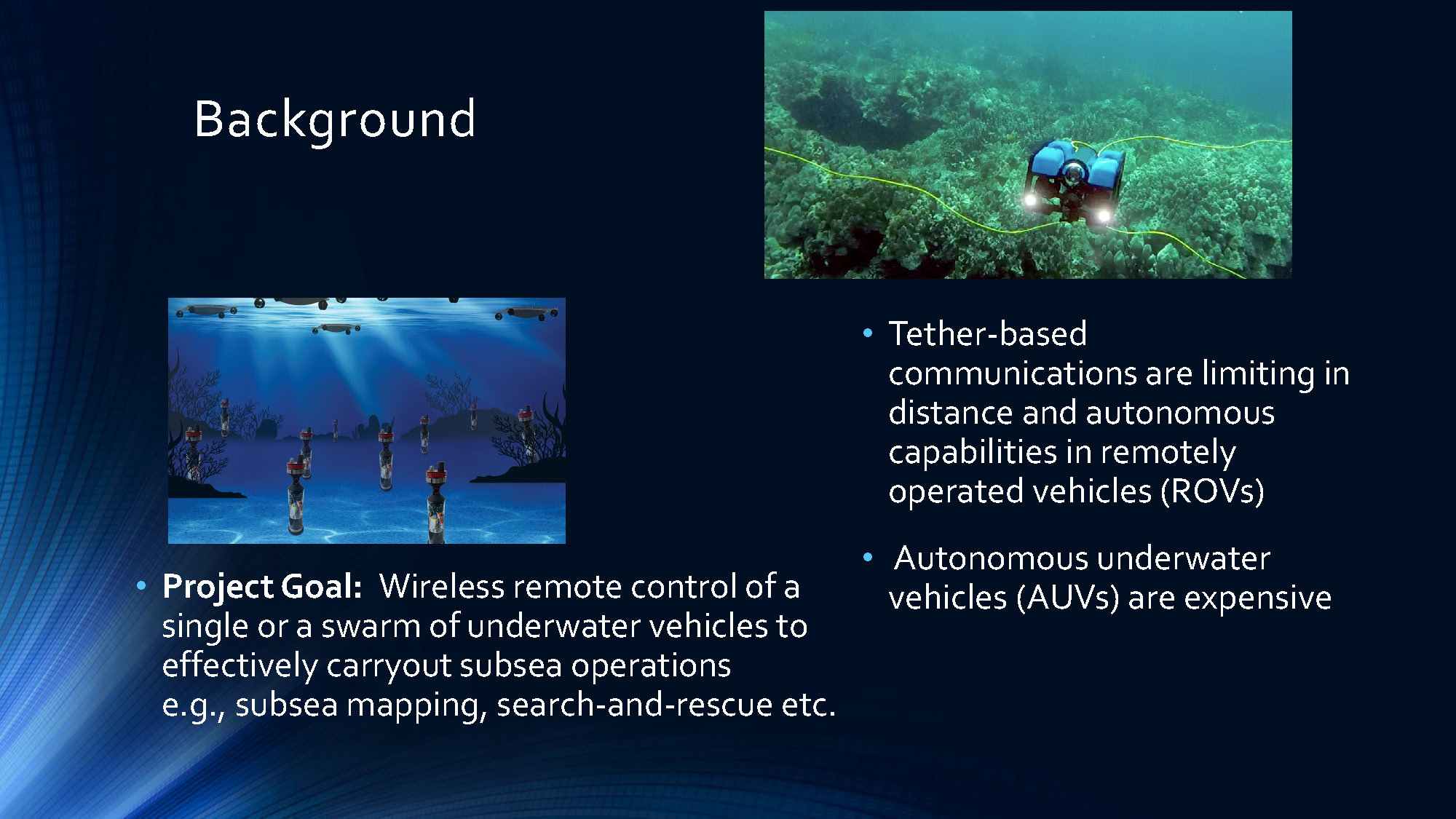
Project Goal:
• Wireless remote control of a single or a swarm of underwater vehicles to effectively carryout subsea operations e.g., subsea mapping, search-and-rescue etc.
• Tether-based communications are limiting in distance and autonomous capabilities in remotely operated vehicles (ROVs)
• Autonomous underwater vehicles (AUVs) are expensive
References include Blue Robotics BlueROV2 store page and IEEE research paper on underwater acoustic communications
In this Project
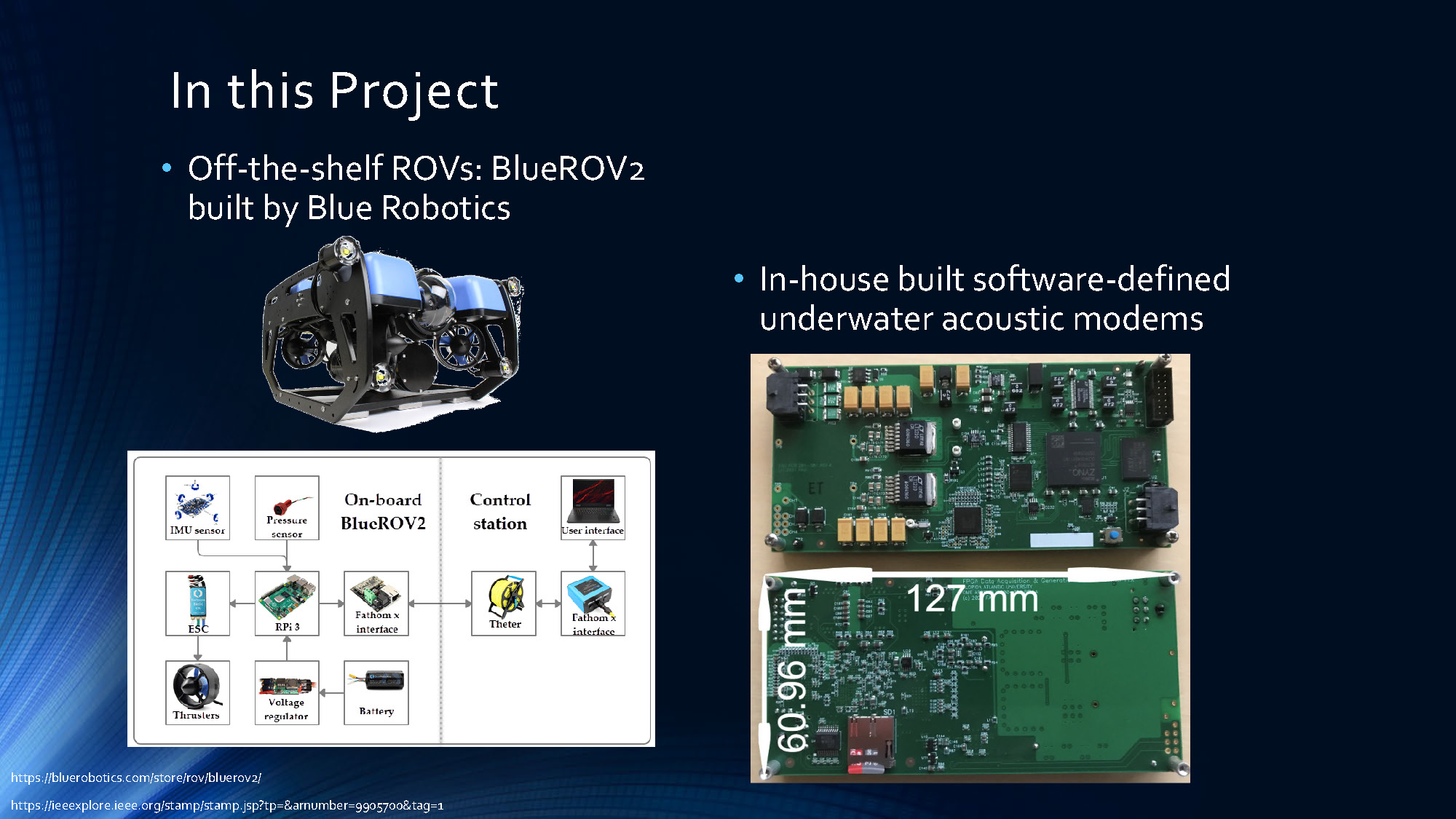
• Off-the-shelf ROVs: BlueROV2 built by Blue Robotics
• In-house built software-defined underwater acoustic modems
Image shows the BlueROV2 underwater vehicle with its distinctive blue frame and multiple thrusters.
Related Work
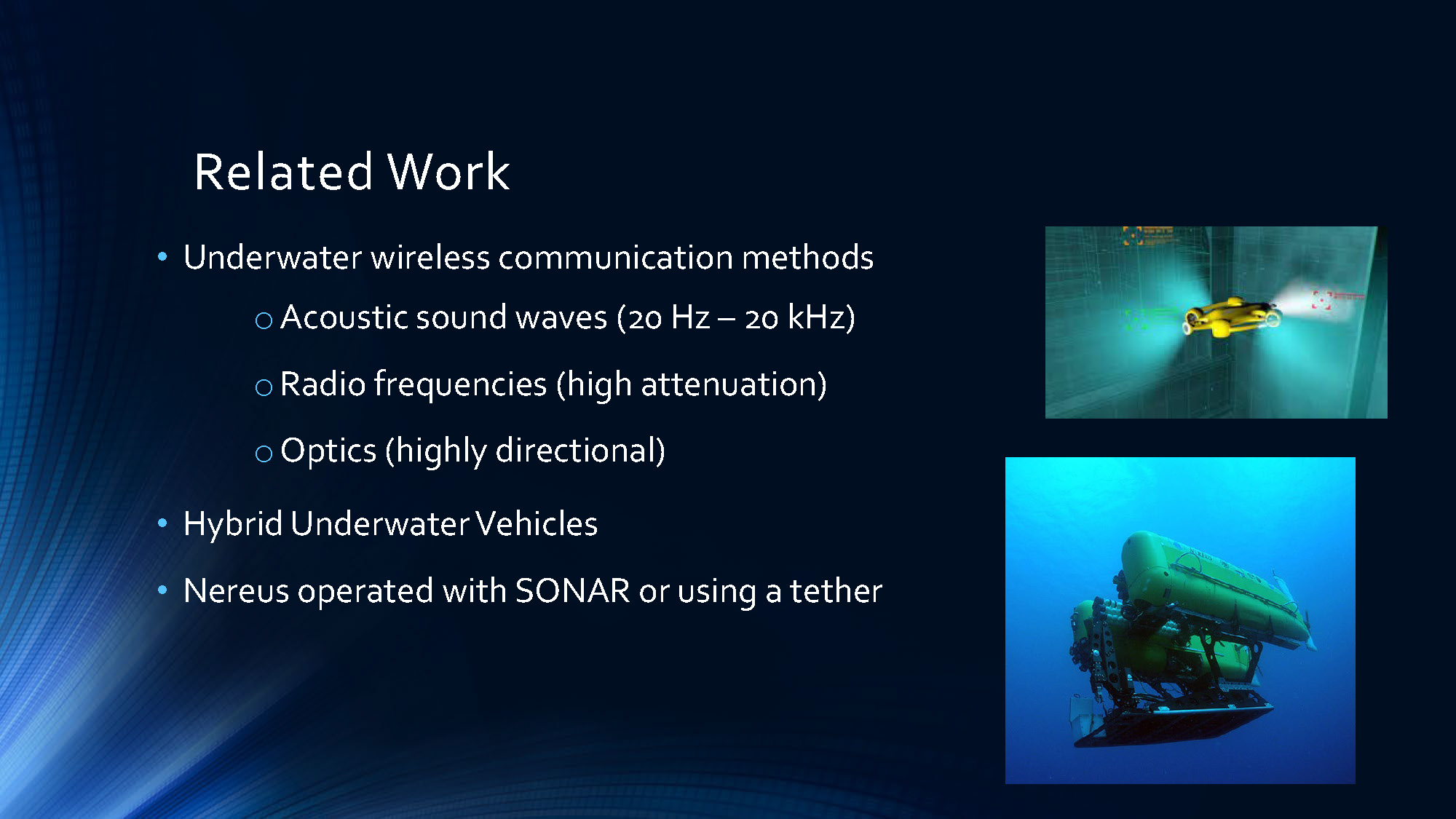
- Underwater wireless communication methods
- Acoustic sound waves (20 Hz – 20 kHz)
- Radio frequencies (high attenuation)
- Optics (highly directional)
- Hybrid Underwater Vehicles
- Nereus operated with SONAR or using a tether
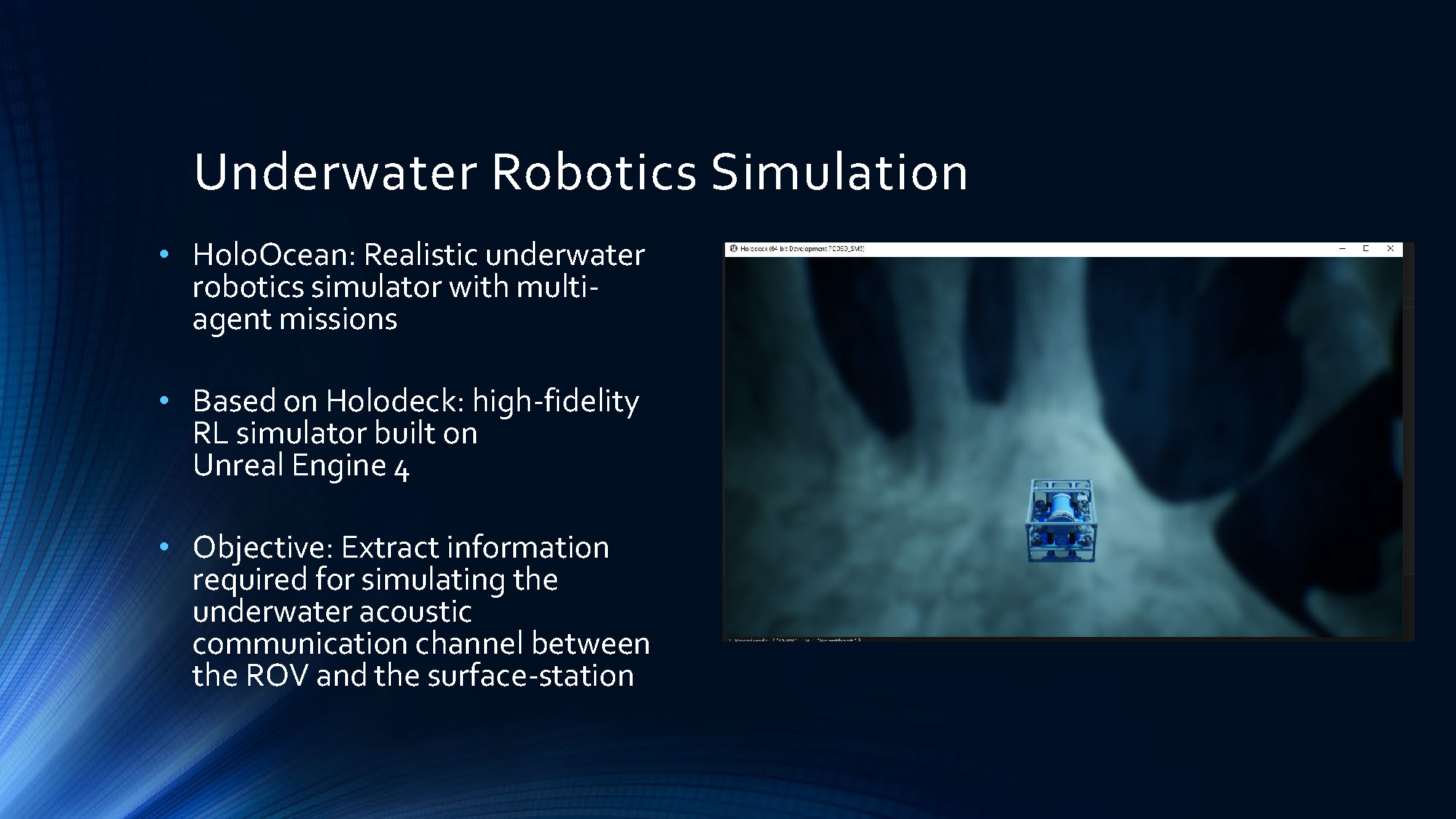
Underwater Robotics Simulation
• HoloOcean: Realistic underwater robotics simulator with multi-agent missions
• Based on Holodeck: high-fidelity RL simulator built on Unreal Engine 4
• Objective: Extract information required for simulating the underwater acoustic communication channel between the ROV and the surface-station
The slide includes an underwater scene simulation showing the seafloor environment that would be used for testing ROV operations.
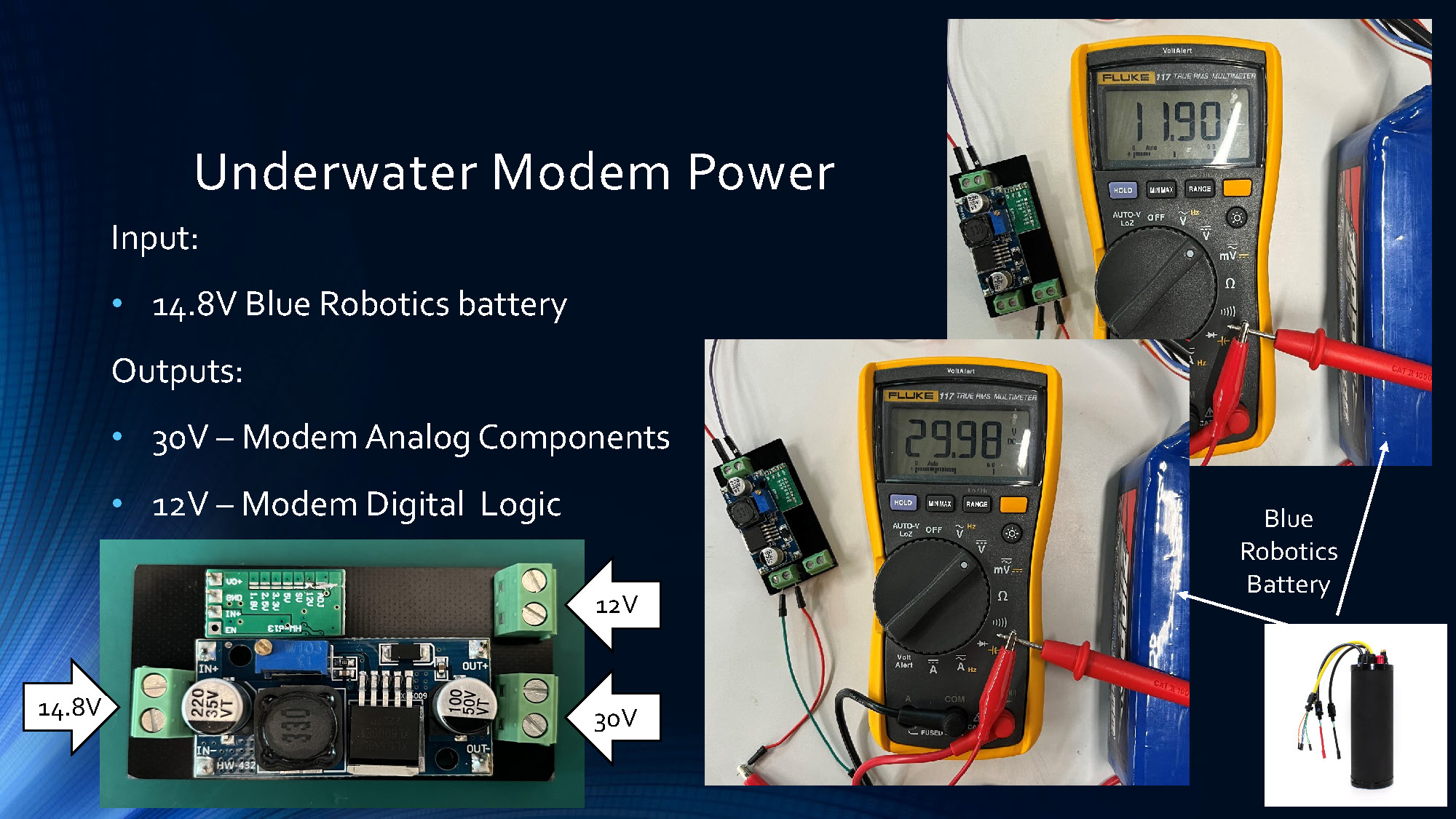
Underwater Modem Power
Input:
• 14.8V Blue Robotics battery
Outputs:
- 30V – Modem Analog Components
- 12V – Modem Digital Logic
The diagram shows a power management system converting the 14.8V input from the Blue Robotics battery to the required 12V and 30V outputs for different modem components.
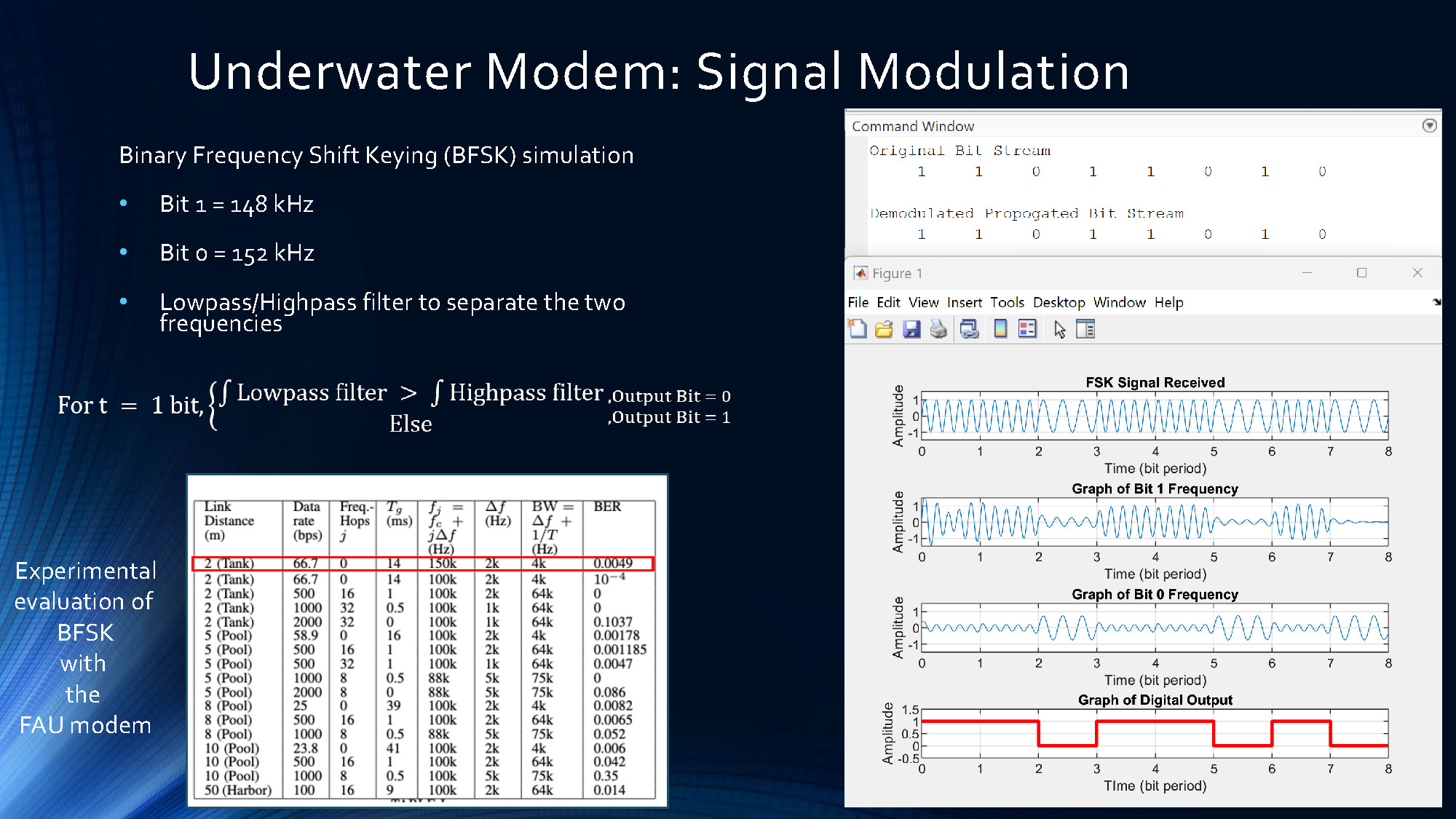
Underwater Modem: Signal Modulation
Binary Frequency Shift Keying (BFSK) simulation
- Bit 1 = 148 kHz
- Bit 0 = 152 kHz
- Lowpass/Highpass filter to separate the two frequencies
Experimental evaluation of BFSK with the FAU modem with image of data in table
The slide includes signal waveform diagrams showing the frequency shift keying modulation technique used for underwater acoustic communication, with distinct frequencies representing binary 1 and 0 bits.
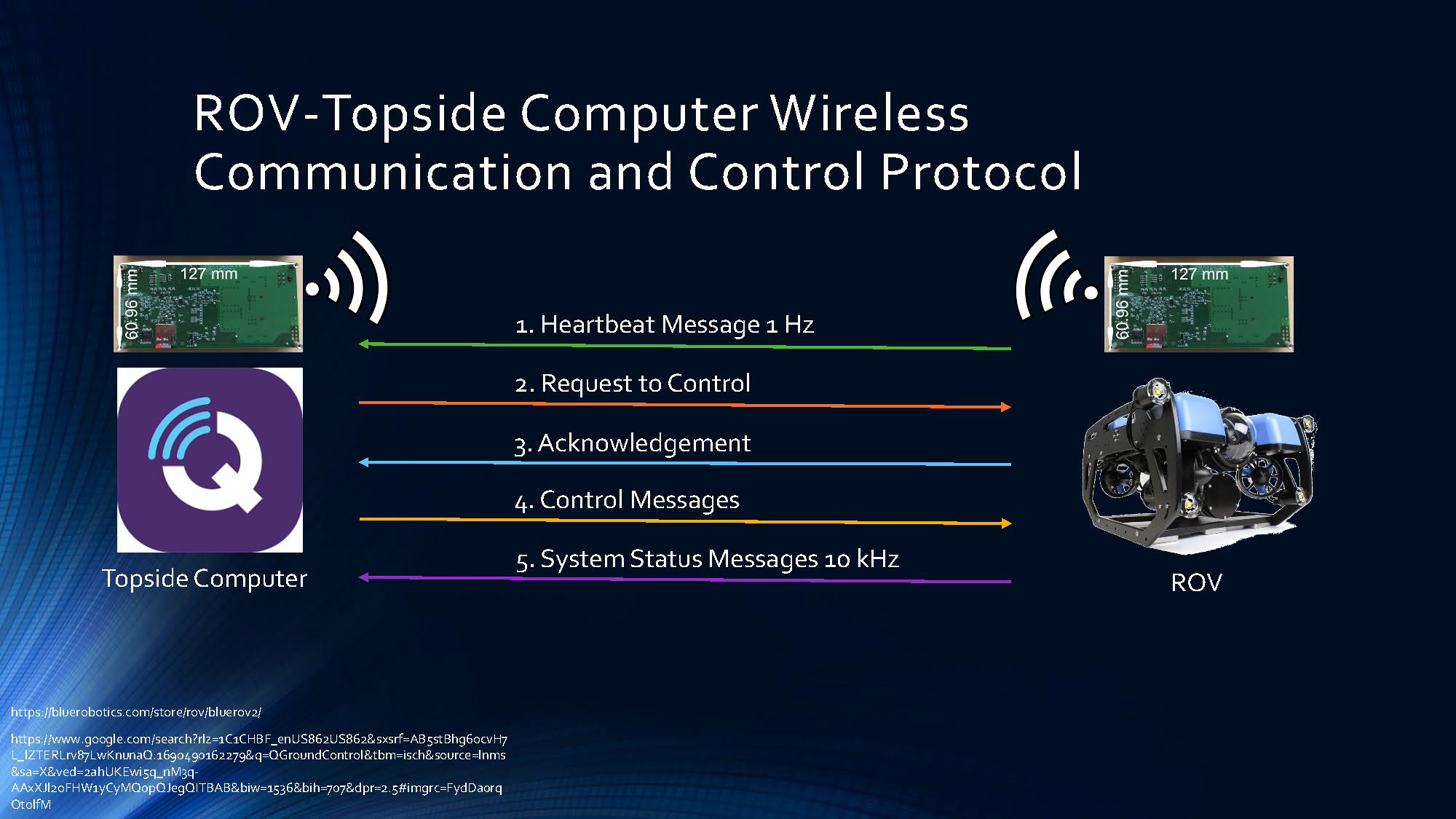
ROV-Topside Computer Wireless Communication and Control Protocol
The communication protocol includes the following message sequence:
- Heartbeat Message 1 Hz
- Request to Control
- Acknowledgement
- Control Messages
- System Status Messages 10 kHz
The diagram shows bidirectional communication between the ROV and Topside Computer, with QGroundControl software interface shown as the control system for the underwater vehicle operations.
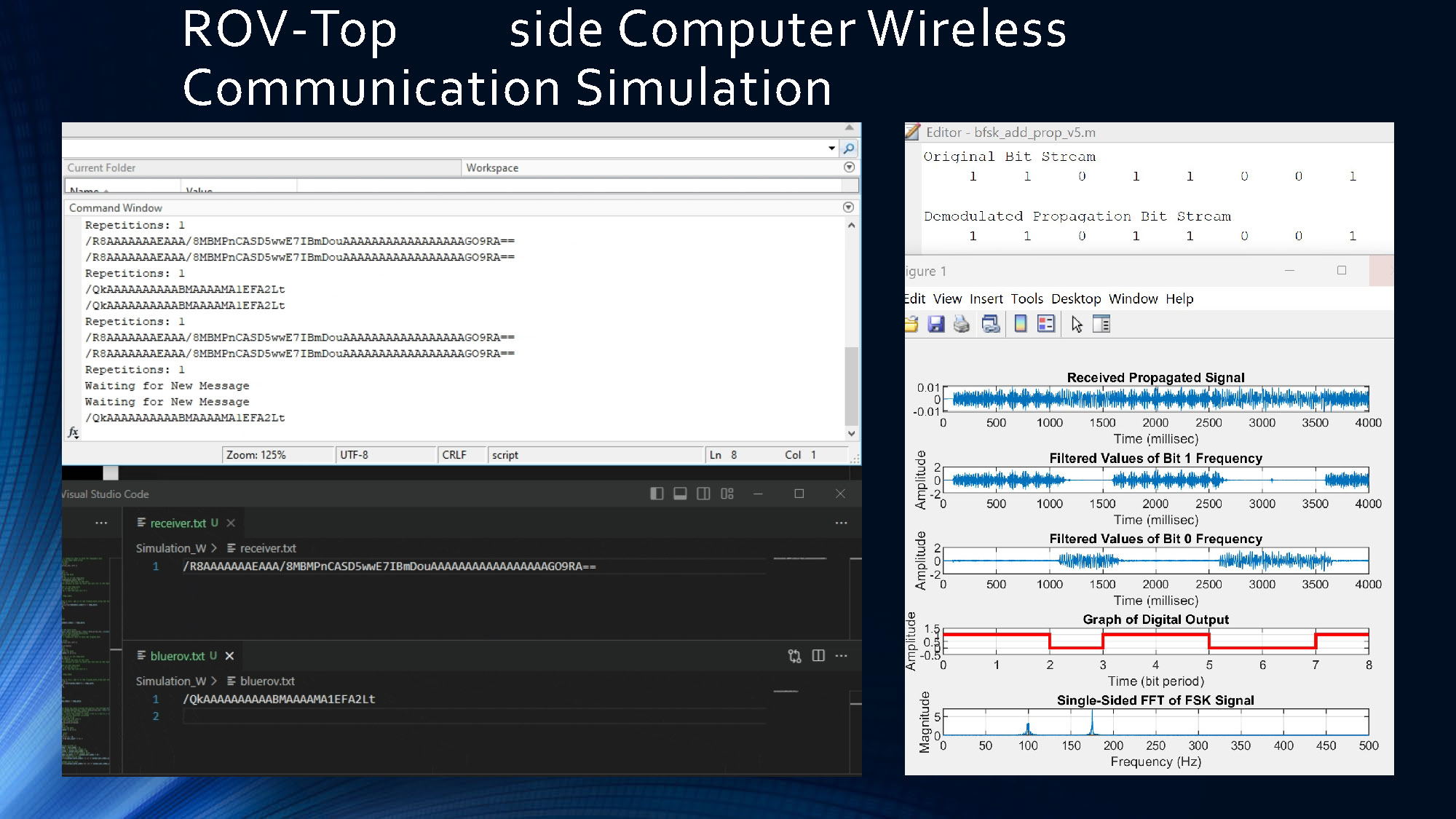
ROV-Topside Computer Wireless Communication Simulation
This slide presents simulation results for the wireless communication protocol between the ROV and topside computer. The simulation demonstrates the feasibility of the proposed communication system and validates the message exchange protocols described in the previous slide.
The results show successful implementation of the heartbeat messages, control requests, acknowledgements, and status updates in a simulated underwater environment.
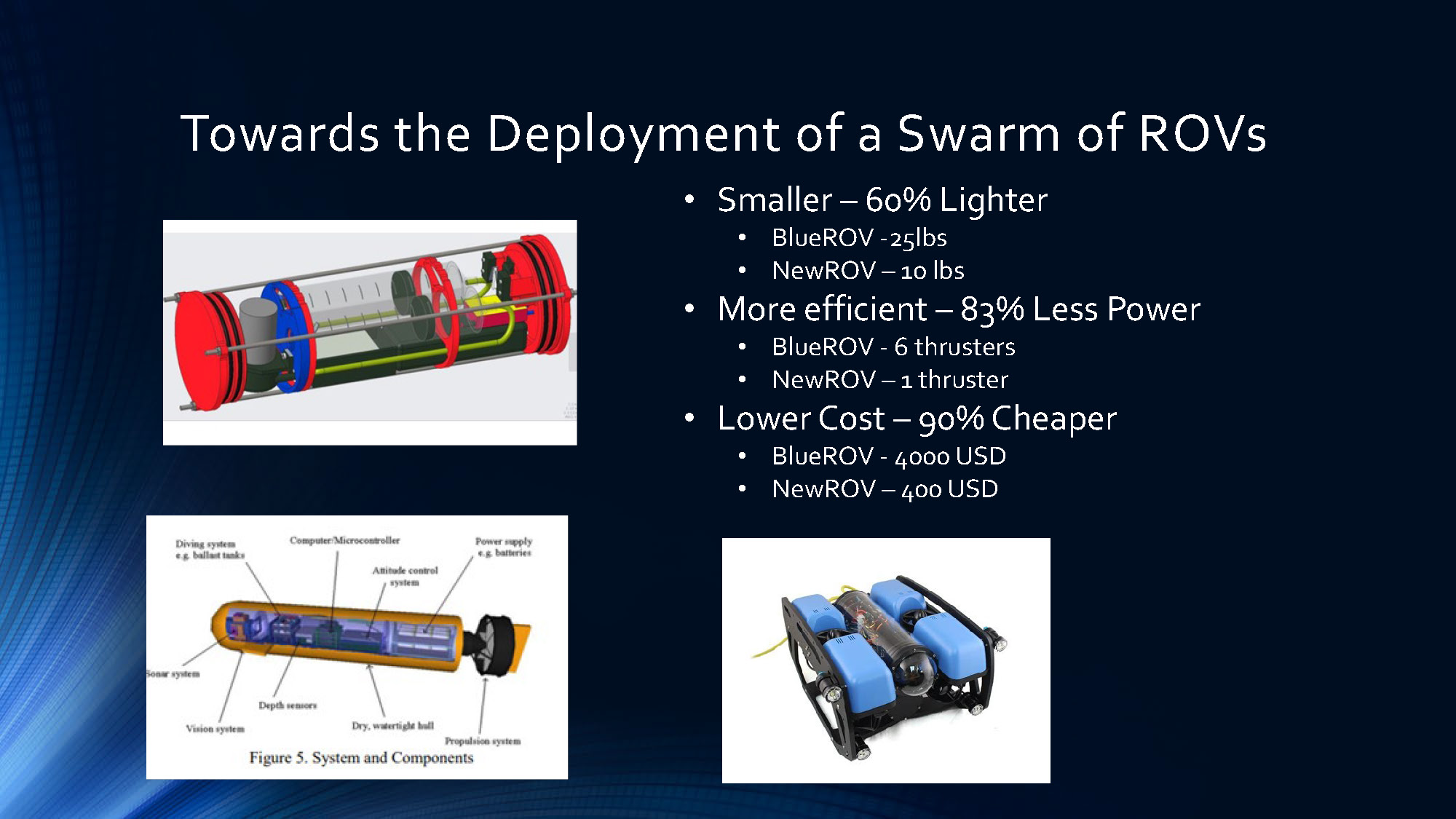
Towards the Deployment of a Swarm of ROVs
Comparison: BlueROV vs New ROV
Smaller – 60% Lighter
- BlueROV - 25lbs
- NewROV – 10 lbs
More efficient – 83% Less Power
- BlueROV - 6 thrusters
- NewROV – 1 thruster
Lower Cost – 90% Cheaper
- BlueROV - 4000 USD
- NewROV – 400 USD
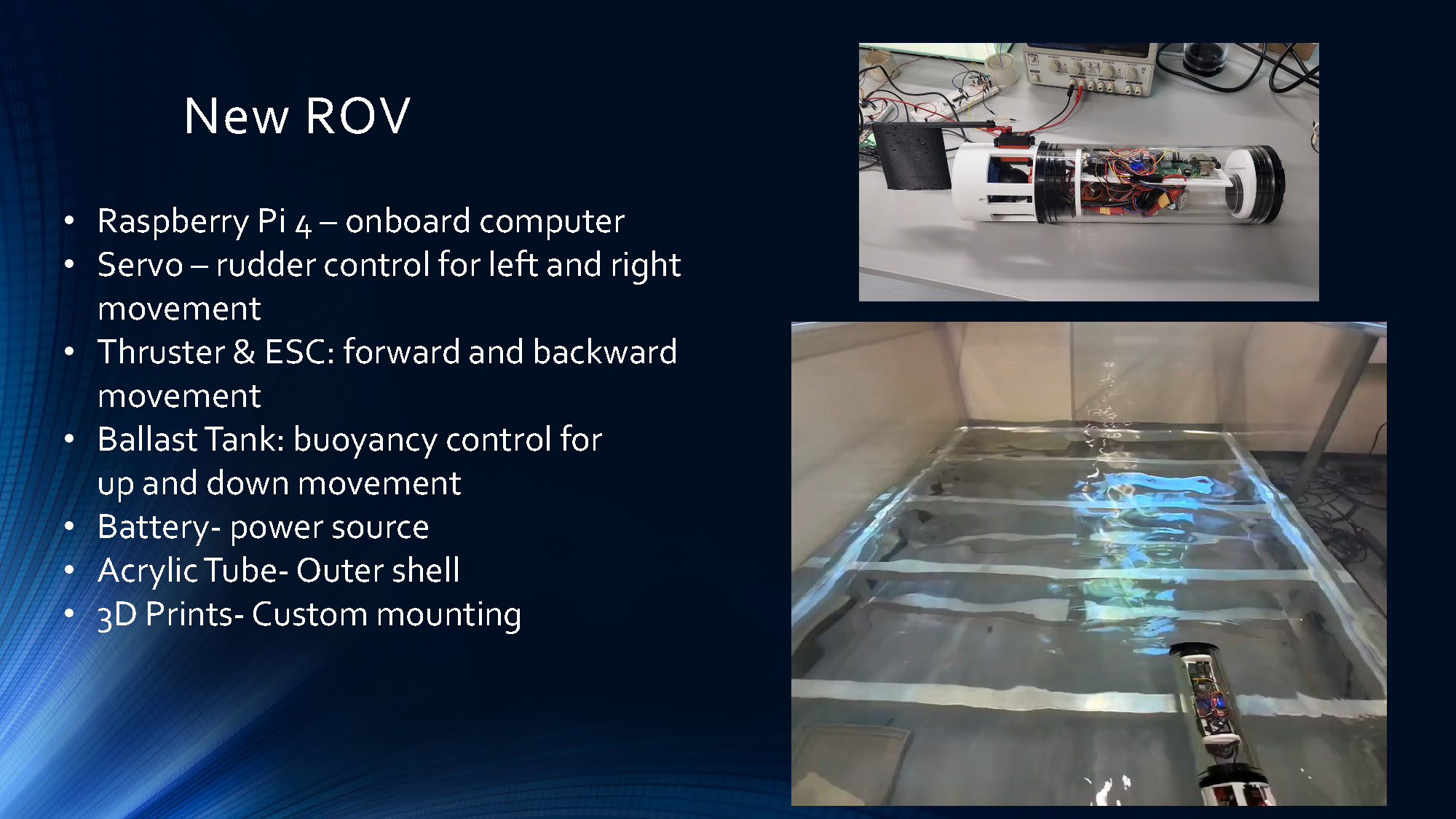
New ROV
Components:
- Raspberry Pi 4 – onboard computer
- Servo – rudder control for left and right movement
- Thruster & ESC: forward and backward movement
- Ballast Tank: buoyancy control for up and down movement
- Battery- power source
- Acrylic Tube- Outer shell
- 3D Prints- Custom mounting
The slide shows the compact design of the new ROV with its cylindrical acrylic housing and integrated components for autonomous underwater operations.
Conclusions
- Designed, built and tested a power management module to integrate the FAU underwater acoustic modem on-board the BlueROV2
- Simulated a simple non-coherent signal modulation based on Frequency Shift Keying in ideal and underwater channels to test ROV-Topside Computer wireless communication
- Interfaced the BFSK simulations with MAVLink message protocol for bidirectional communication between the ROV and Topside computer
- Extracted environmental information from an underwater robotics simulator (HoloOcean) to increase the fidelity of our underwater comms simulations
- Designed, built and tested a small, low-cost, lightweight ROV to evaluate the feasibility of deploying a fleets of ROVs in the future
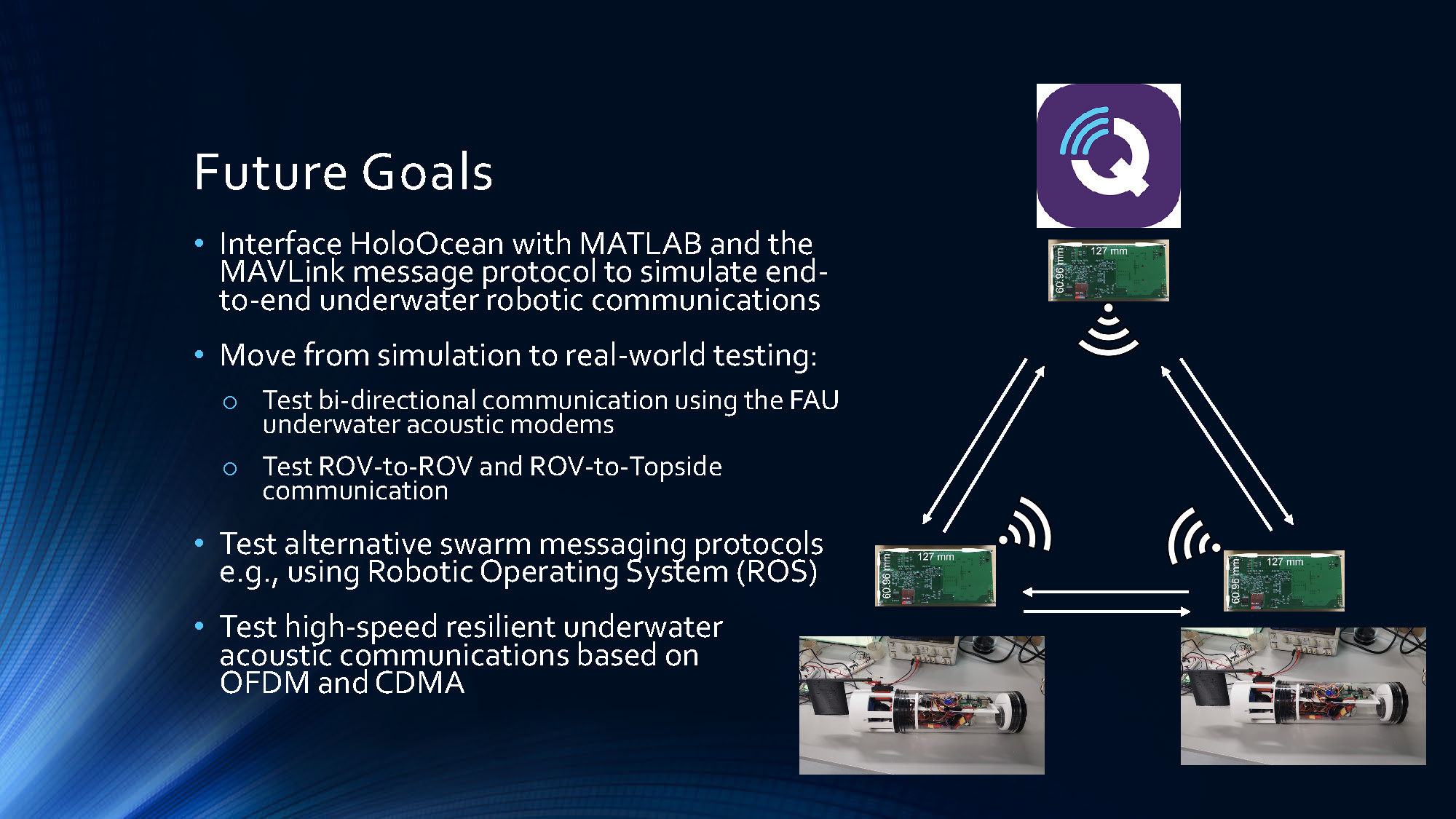
Future Goals
- Interface HoloOcean with MATLAB and the MAVLink message protocol to simulate end-to-end underwater robotic communications
- Move from simulation to real-world testing:
- Test bi-directional communication using the FAU underwater acoustic modems
- Test ROV-to-ROV and ROV-to-Topside communication
- Test alternative swarm messaging protocols e.g., using Robotic Operating System (ROS)
- Test high-speed resilient underwater acoustic communications based on OFDM and CDMA
End of Presentation
Click the right arrow to return to the beginning of the slide show.
For a downloadable version of this presentation, email: I-SENSE@FAU.