Adaptive Traffic Control
By Oghenekaro Durojaiye

ADAPTIVE TRAFFIC CONTROL
Presented by OGHENEKARO DUROJAIYE

ABOUT KARO
ADAPTIVE TRAFFIC CONTROL
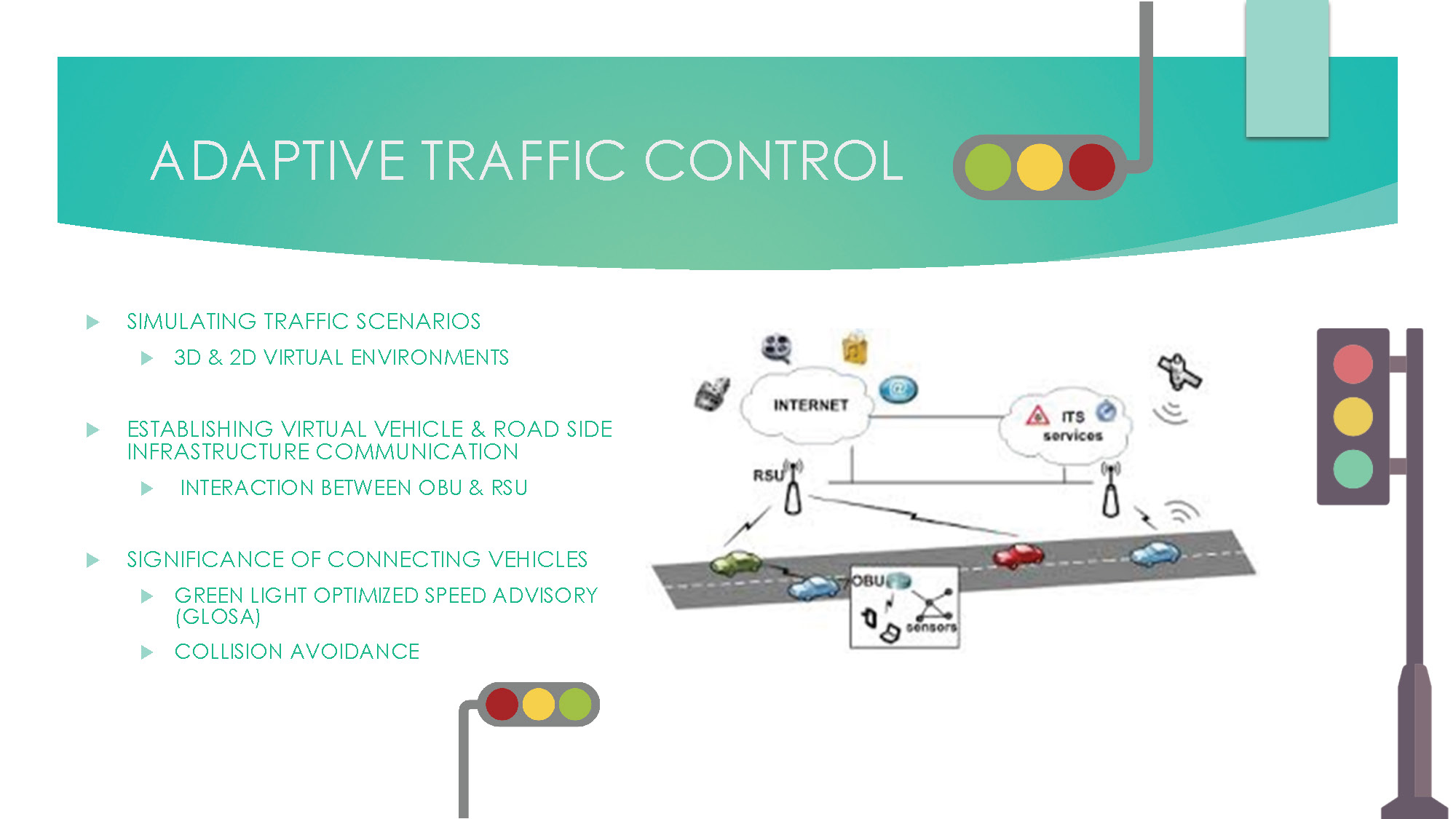
- SIMULATING TRAFFIC SCENARIOS
- 3D & 2D VIRTUAL ENVIRONMENTS
- ESTABLISHING VIRTUAL VEHICLE & ROAD SIDE INFRASTRUCTURE COMMUNICATION
- INTERACTION BETWEEN OBU & RSU
- SIGNIFICANCE OF CONNECTING VEHICLES
- GREEN LIGHT OPTIMIZED SPEED ADVISORY (GLOSA)
- COLLISION AVOIDANCE
THE SET UP
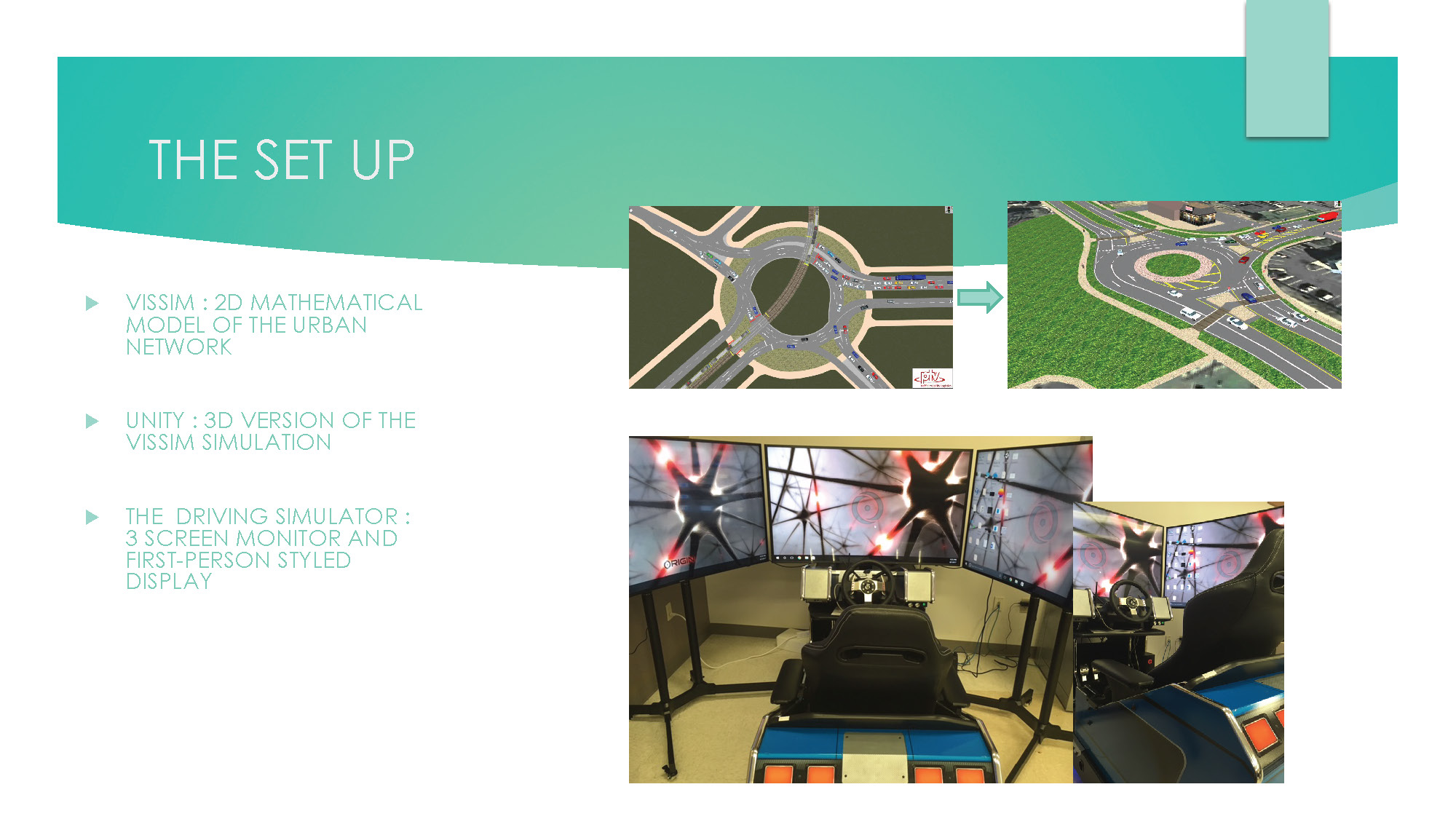
- VISSIM : 2D MATHEMATICAL MODEL OF THE URBAN NETWORK
- UNITY : 3D VERSION OF THE VISSIM SIMULATION
- THE DRIVING SIMULATOR : 3 SCREEN MONITOR AND FIRST-PERSON STYLED DISPLAY
INSIDE VISSIM
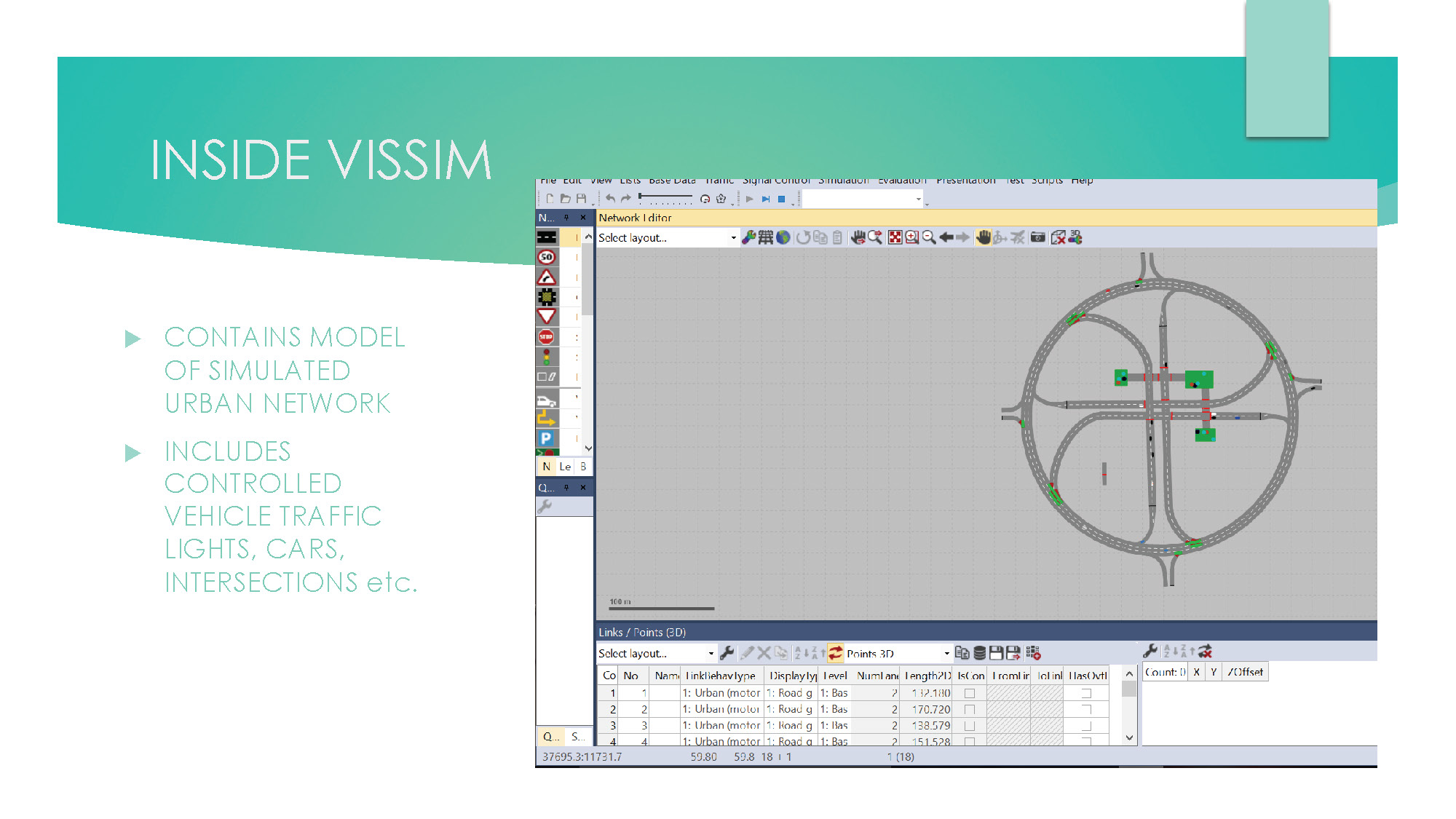
- CONTAINS MODEL OF SIMULATED URBAN NETWORK
- INCLUDES CONTROLLED VEHICLE TRAFFIC LIGHTS, CARS, INTERSECTIONS etc.
INSIDE UNITY
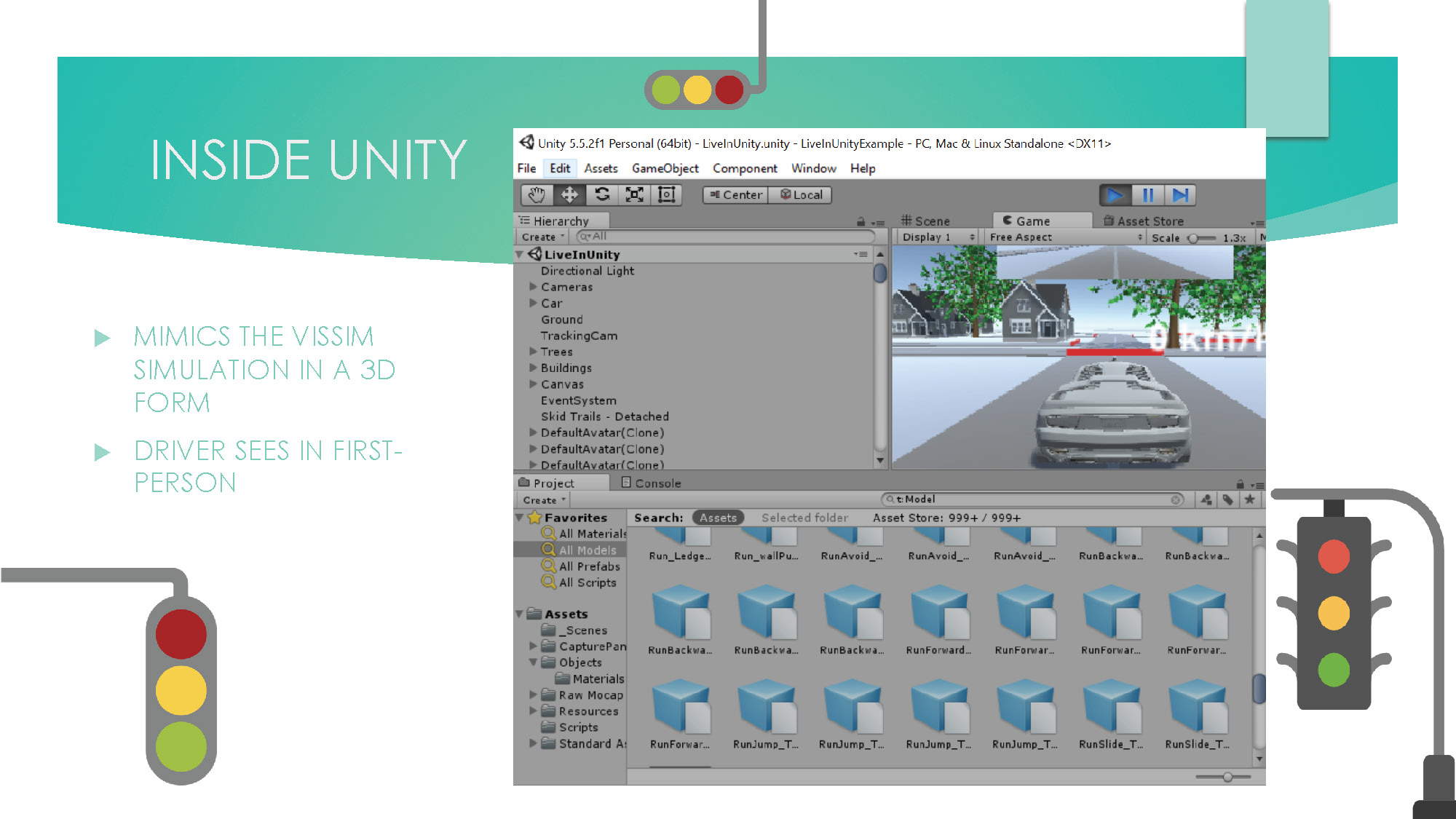
- MIMICS THE VISSIM SIMULATION IN A 3D FORM
- DRIVER SEES IN FIRST-PERSON
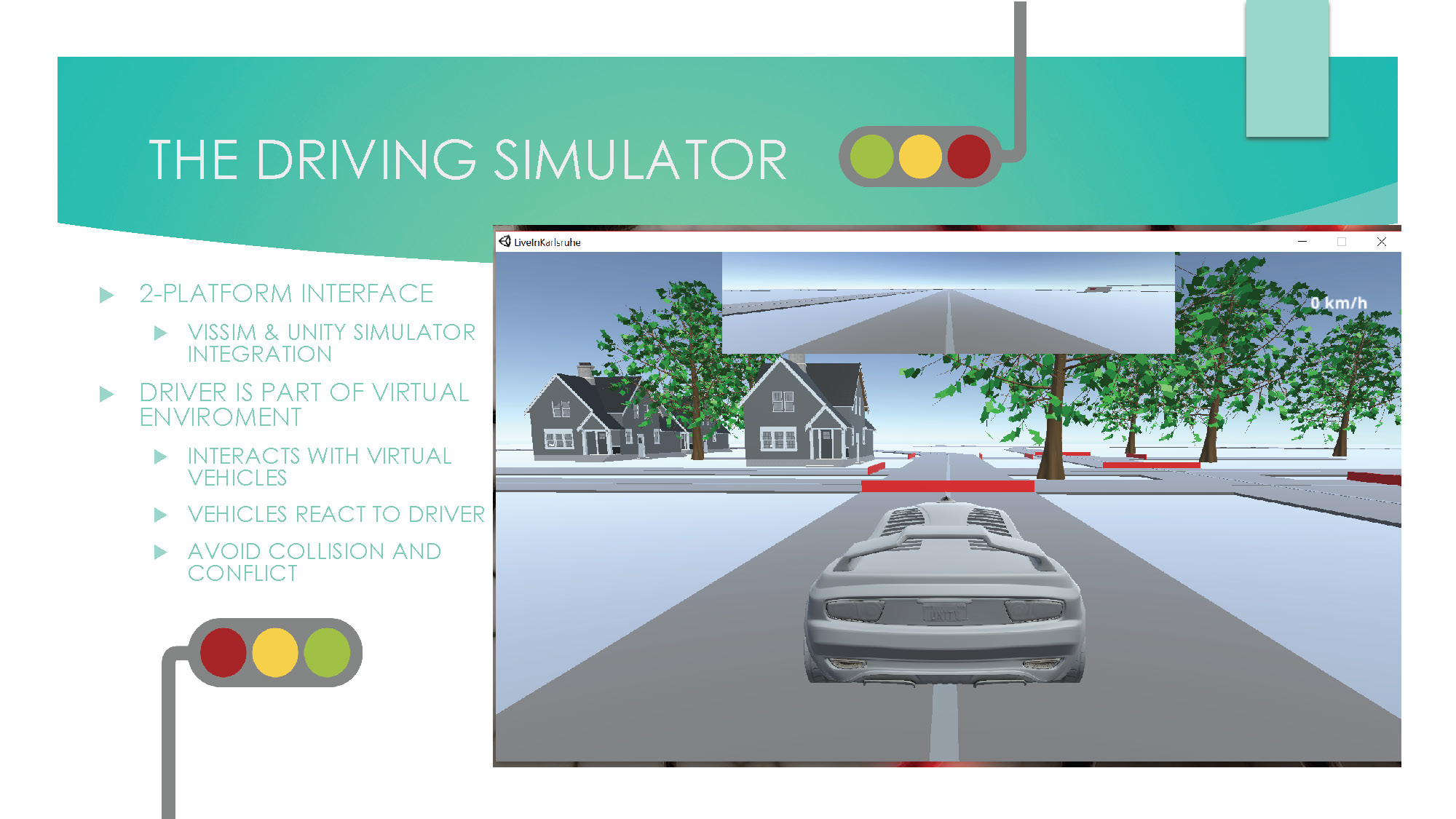
THE DRIVING SIMULATOR
- 2-PLATFORM INTERFACE
- VISSIM & UNITY SIMULATOR INTEGRATION
- DRIVER IS PART OF VIRTUAL ENVIROMENT
- INTERACTS WITH VIRTUAL VEHICLES
- VEHICLES REACT TO DRIVER
- AVOID COLLISION AND CONFLICT
CHALLENGES
- INTERGRATING UNITY AND VISSIM
- COMBINING UNITY C# SCRIPTS AND VISSIM C# CODE
- ESTABLISHING SEAMLESS COMMUNCATION
- UNABLE TO SPAWN THE OTHER VIRTUAL VEHICLES IN 3D ENVIRONMENT
- PROGRAM CRASHING
SOLUTIONS
- DISSECT VISSIM SIMULATION CODE
- UPDATE SOFTWARE VERSIONS
- BREAK DOWN UNITY SCRIPTS AND OBJECTS

RESULTS
- FULLY FUNCTIONAL SIMULATOR
- SPEED TRACKING
- EASY VEHICULAR CONTROL
- VISSIM LOADING WITH UNITY
- VISSIM RELAYING VEHICLE POSTION TO UNITY GAME
FUTURE WORK
- SPAWNING VISSIM VEHICLES IN UNITY
- VIRTUAL REALITY
End of Presentation
Click the right arrow to return to the beginning of the slide show.
For a downloadable version of this presentation, email: I-SENSE@FAU.