Towards Development of a Digital Twin for Simulation of Underwater Robotics
Towards Development of a Digital Twin for Simulation of Underwater Robotics
Jeremy Kim
Mechanical Engineering
REU Scholar
University of Alabama
jkim228@crimson.ua.edu
George Sklivanitis, Ph.D., EECS
REU Mentor
gsklivanitis@fau.edu
Parker Wilmoth
Graduate Student
REU Mentor
EECS
pwilmoth2023@fau.edu
Motivation
The slide displays three historical images representing underwater exploration:
Bathysphere - described as from the early days of deep sea exploration, shown as a spherical diving vessel
Trieste - identified as the first submersible to journey to the Mariana Trench about 10,916 meters or 35,813 feet in 1960, displayed as a large submarine-like vessel
Jacques Cousteau - noted as a pioneer of modern day scuba, shown in diving equipment
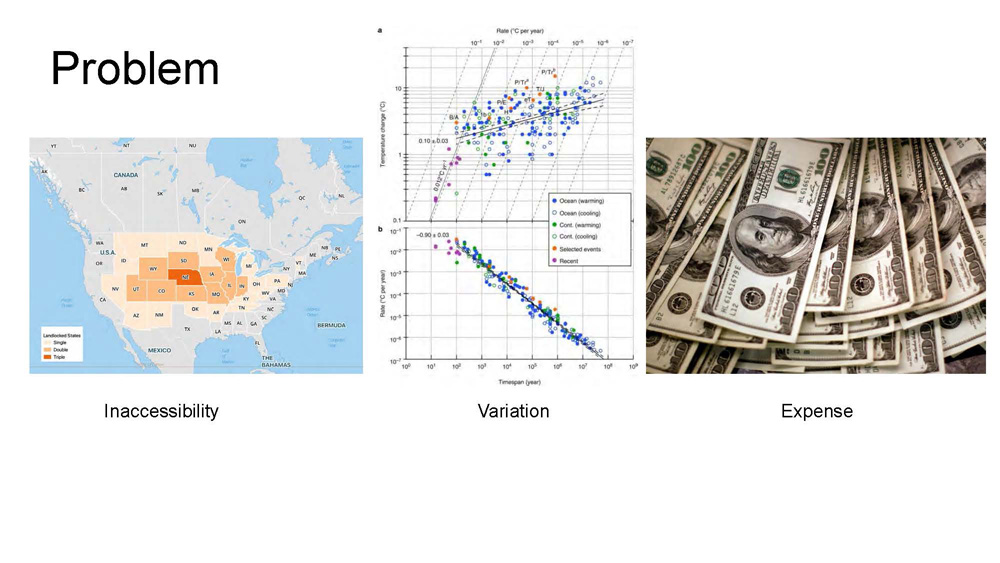
Problem
The slide identifies three main challenges in underwater robotics research:
Inaccessibility - represented with a map showing the difficulty of accessing deep ocean environments
Expense - illustrated with cost-related graphics highlighting the high financial investment required for underwater operations
Variation - depicted with imagery showing the diverse and changing conditions in underwater environments
Solution
The slide shows an underwater environment with a robotic vehicles.
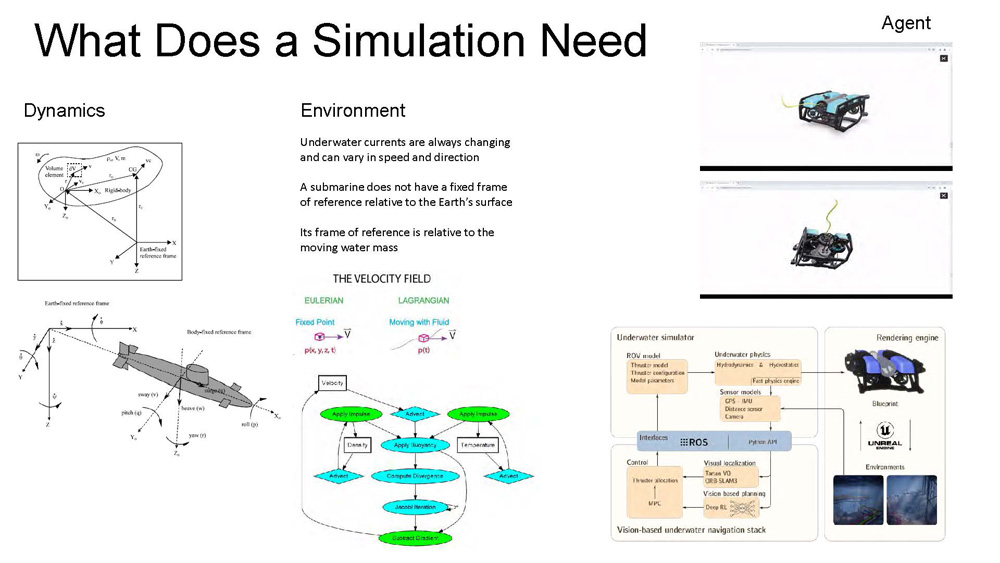
What Does a Simulation Need
Dynamics and Environment
Underwater currents are always changing and can vary in speed and direction
A submarine does not have a fixed frame of reference relative to the Earth's surface
Its frame of reference is relative to the moving water mass
The slide includes visual elements representing the underwater environment requirements for accurate simulation
Agent
The slide shows robotic agent requirements for the simulation system
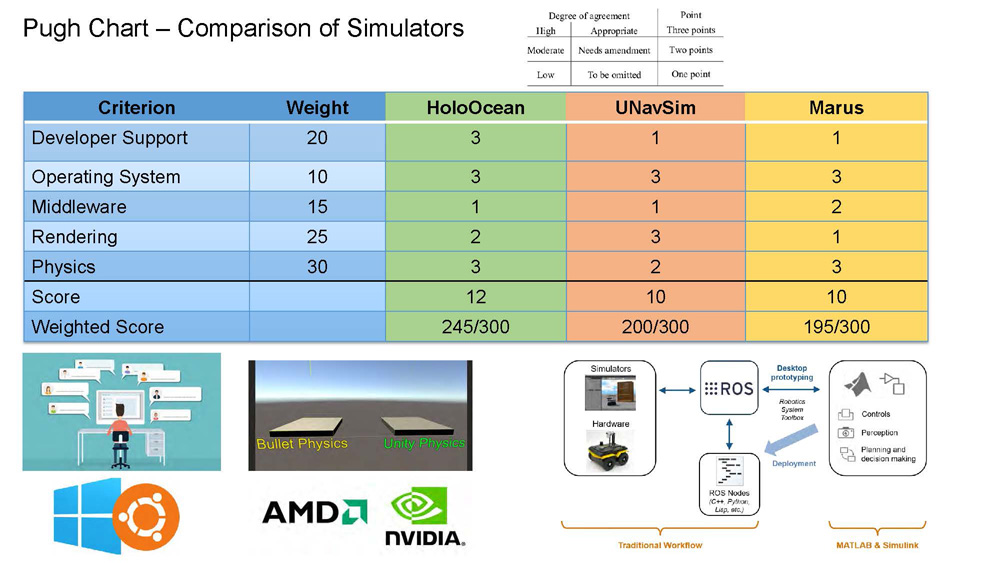
Pugh Chart – Comparison of Simulators
| Criterion | Weight | HoloOcean | UNavSim | Marus |
|---|---|---|---|---|
| Developer Support | 20 | 3 | 1 | 1 |
| Operating System | 10 | 3 | 3 | 3 |
| Middleware | 15 | 1 | 1 | 2 |
| Rendering | 25 | 2 | 3 | 1 |
| Physics | 30 | 3 | 2 | 3 |
| Score | 12 | 10 | 10 | |
| Weighted Score | 245/300 | 200/300 | 195/300 |
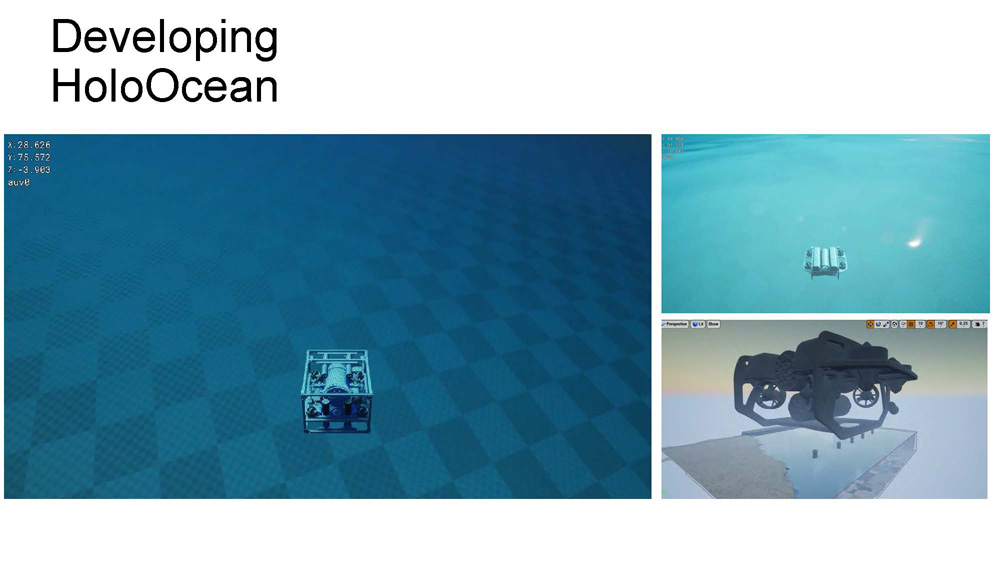
Developing HoloOcean
The slide shows three illustrations of HoloOcean with machinery/robots.
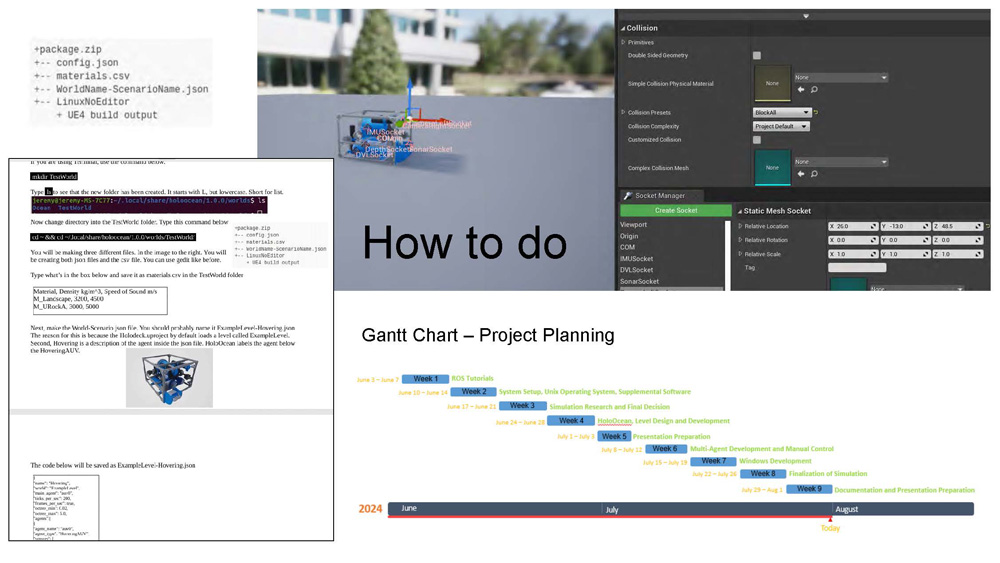
How to do
Gantt Chart – Project Planning
The slide displays a Gantt chart showing the project timeline and implementation phases for developing the underwater robotics digital twin. The chart outlines the sequential steps and milestones needed to complete the HoloOcean-based simulation system, including development phases, testing periods, and delivery milestones.
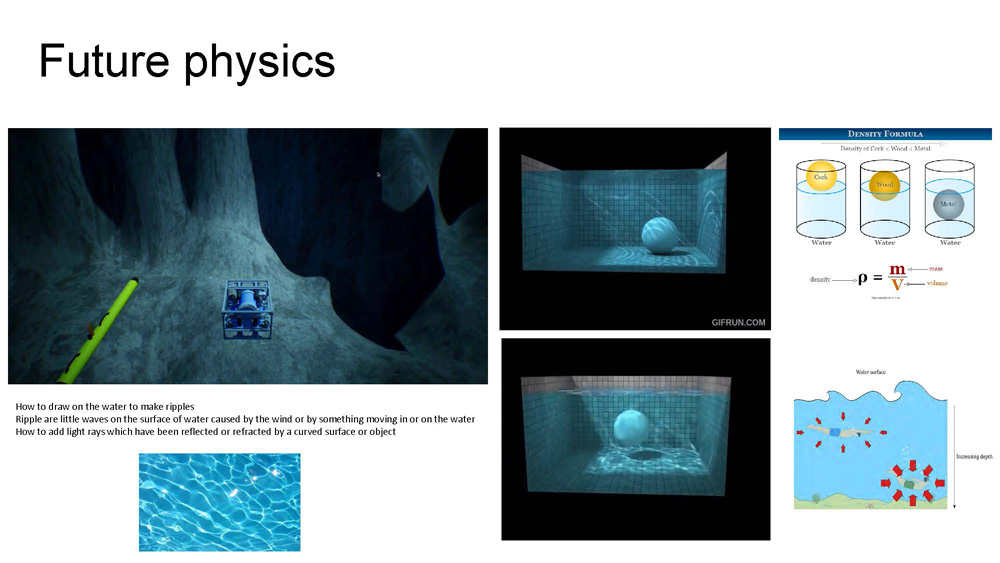
Future physics
How to draw on the water to make ripples
Ripple are little waves on the surface of water caused by the wind or by something moving in or on the water
The slide includes visual demonstrations of planned enhancements to the simulation, including water surface effects and underwater vehicle sensor capabilities.
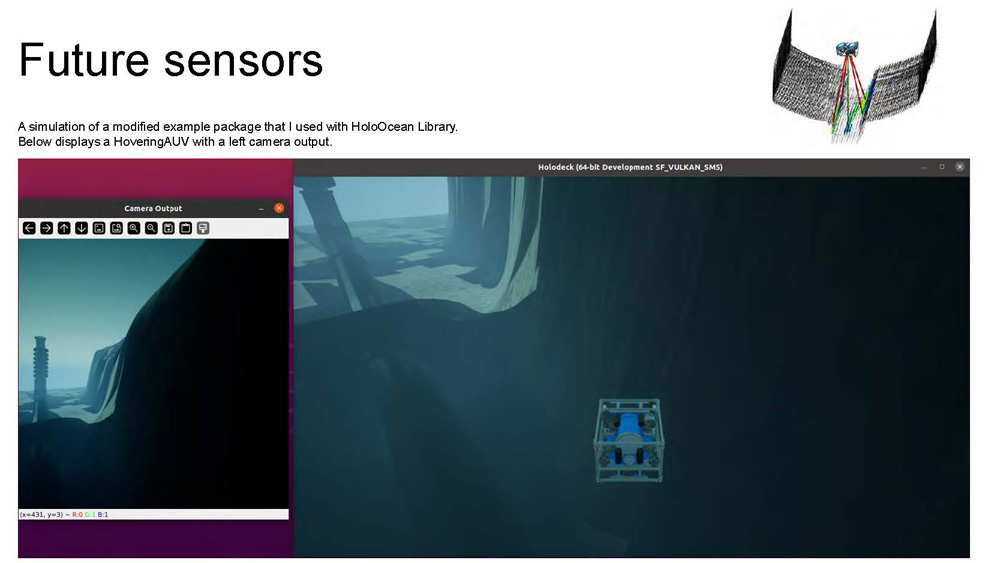
Future sensors
A simulation of a modified example package that I used with HoloOcean Library.
Below displays a HoveringAUV with a left camera output.
The slide includes visual display of a HoveringAUV with a left camera output
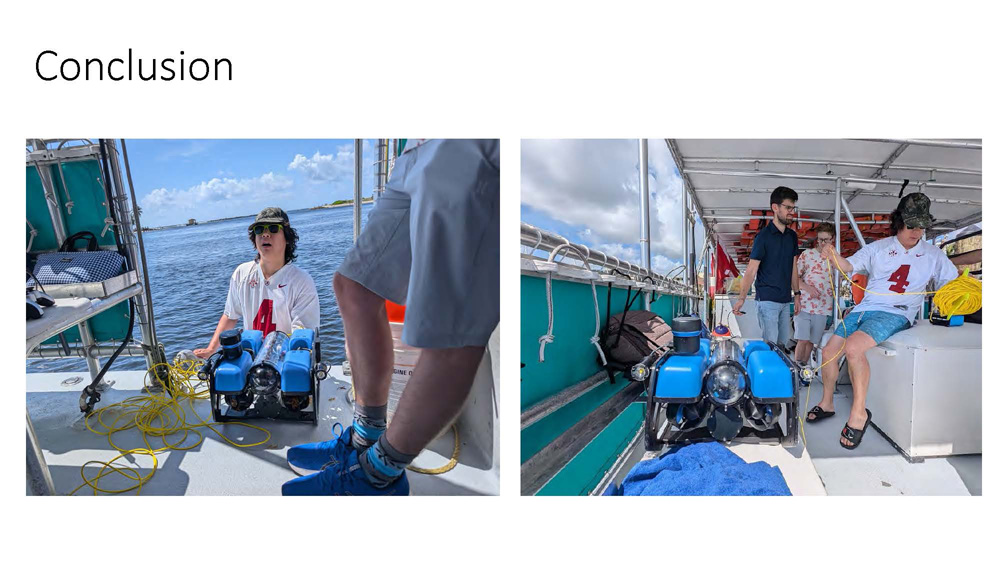
Conclusion
The slide presents two images of this team working in the boat/ocean environment.
End of Presentation
Click the right arrow to return to the beginning of the slide show.
For a downloadable version of this presentation, email: I-SENSE@FAU.