Utilizing Hall Effect Sensors and Artificial Neural Networks to Classify Soft Magnetic Actuator Pose
Arhan Sankhla, REU Student
College of Engineering, Rice University
Research Mentor: Dr. Erik Engeberg, Professor, Department of Biomedical Engineering
NSF REU: Sensing and Smart Systems
Table of contents
01 Background
02 Research Gap
03 Techniques
04 Actuator Manufacturing Process
05 Set Up
06 Results
Background
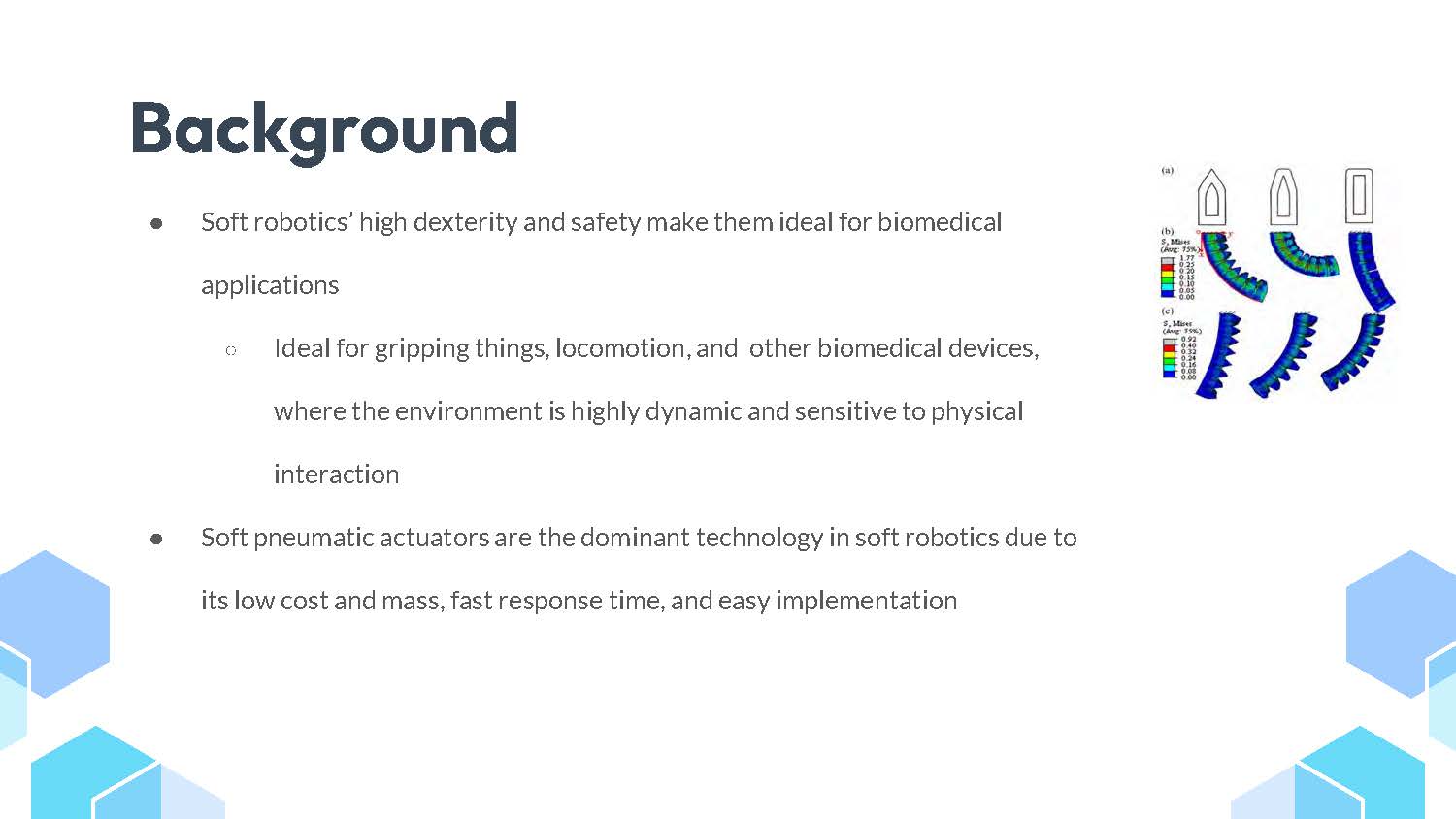
Soft robotics' high dexterity and safety make them ideal for biomedical applications. Ideal for gripping things, locomotion, and other biomedical devices, where the environment is highly dynamic and sensitive to physical interaction.
Soft pneumatic actuators are the dominant technology in soft robotics due to its low cost and mass, fast response time, and easy implementation
Background
Ferrofluid - a liquid made of nanoscale magnetic particles suspended in a carrier fluid
Dragonskin - basically stretchy/rubbery feeling silicone
NPR Tool - is a machine learning technique that uses artificial neural networks (ANNs) to recognize patterns in different types of data. ANNs are computational systems that are modeled after the human brain and can learn to associate input patterns with output categories.
Hall Effect Sensor - a sensor that measures the intensity of the magnetic field in volts
Pose - position of the actuator in space
Research Gap
Despite recent breakthroughs, soft pneumatic actuators and robots experience challenges related to integrated sensing and intelligent control.
Mainly there is no effective way to measure where the actuator is in space (position) and what the shape is of the actuator at that time
These gaps are significant because without ways to actively and effectively control these actuators their use in biomedical and other important applications will be diminished
Techniques
Use a hall effect sensor which measures the intensity of the magnetic field along with a soft actuator made out of different ratios of magnetic material (ferrofluid) mixed with silicon
Measure the displacement of the actuator based on the hall effect sensors reading of the magnetic field at specific pressures
Train a neural network with the data from 3 different pressures for each different ratio of ferrofluid to silicon
Test the neural network with training data to see which ratio of ferrofluid to silicon is best for determining the shape/pose of the soft actuator

Actuator Manufacturing Process
- Mix DragonSkin and Ferrofluid in a 85:15, 70:30, and 50:50 ratio
- Pour into mold
- Place tubing inside mold
- Let cure for 24 hours
Set Up
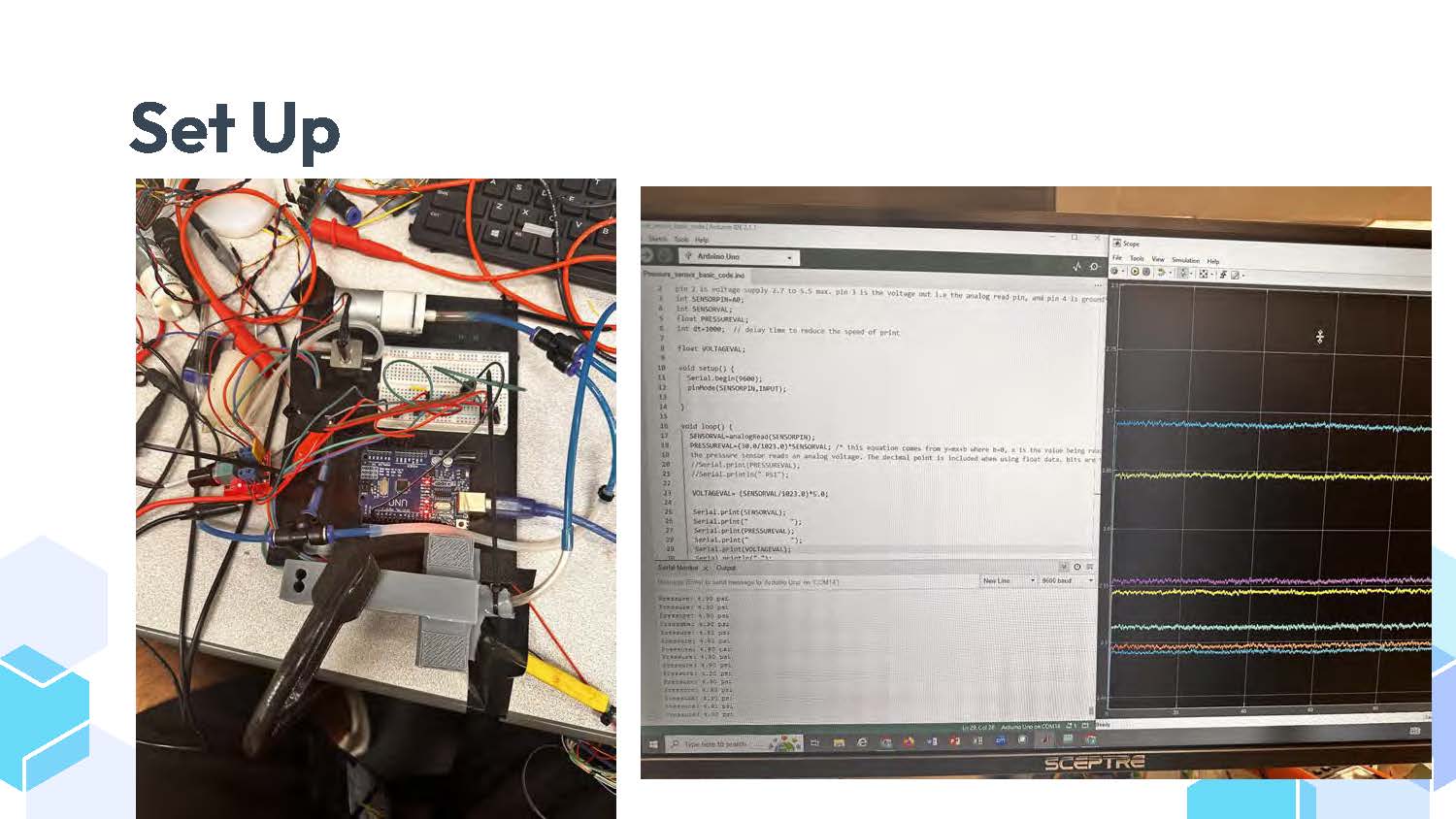
The experimental setup shows a Hall Effect sensor positioned to measure the magnetic field intensity as the soft actuator changes position. The actuator is connected to pneumatic control equipment that allows for precise pressure adjustments. The setup includes measurement equipment to record both the Hall Effect sensor readings and the actuator displacement at various pressure levels.
Set Up
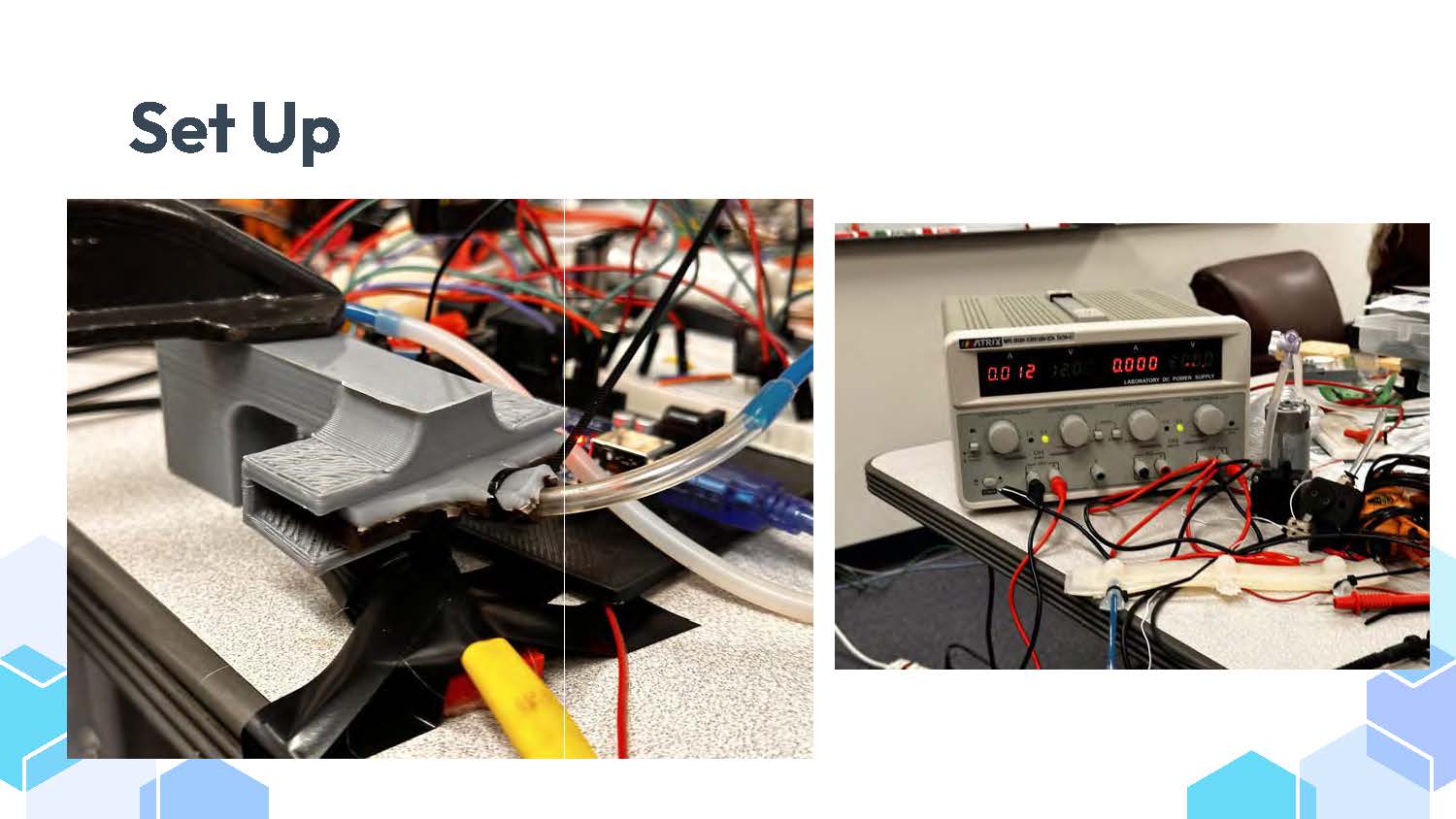
The experimental setup demonstrates the positioning of the Hall Effect sensor relative to the soft actuator. The configuration allows for consistent measurement of magnetic field changes as the actuator undergoes deformation at different pressure levels. The setup ensures repeatable measurements across different ferrofluid to Dragonskin ratios.
Results
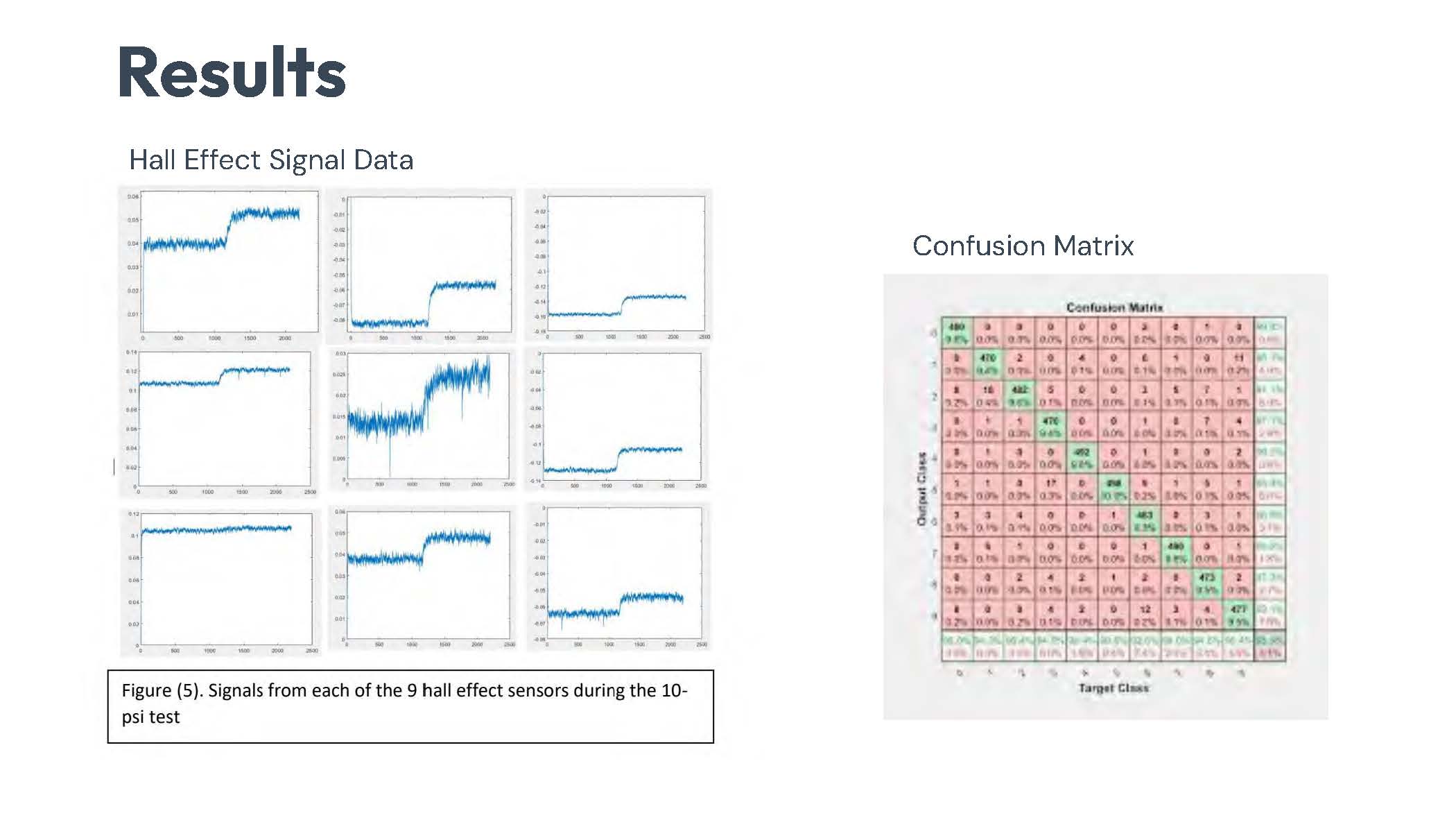
Hall Effect Signal Data
The graph shows Hall Effect sensor voltage measurements over time for different actuator configurations. The data demonstrates varying signal patterns corresponding to different ferrofluid ratios and pressure levels.
Confusion Matrix
The confusion matrix displays the neural network's classification accuracy for different actuator poses. The matrix shows how well the trained neural network can distinguish between different actuator positions based on Hall Effect sensor readings.
Results
Use Matlab NPR tool (Neural Net Pattern Recognition) to train on the pressures selected for each actuator
Input experimental data for each pressure and output the classification accuracy of the neural network for each different combination of Ferrofluid:Dragonskin actuator
Figure out whether or not the amount of ferrofluid in the actuator impacts the hall effect sensor's ability to get consistency in data
Make recommendations on the amount of ferrofluid to use when making Soft pneumatic actuators and whether hall effect sensors work for control/sensing of actuators
References
Hsiao, Jen-Hsuan & Chang, Jen-Yuan & Cheng, Chao-Min. (2019). Soft medical robotics: clinical and biomedical applications, challenges, and future directions. Advanced Robotics. 33. 1-13. 10.1080/01691864.2019.1679251.
H. Xu, P. Agarwal and B. Stephens-Fripp, "Constant Fluidic Mass Control for Soft Actuators Using Artificial Neural Network Algorithm," 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Prague, Czech Republic, 2021, pp. 1732-1739, doi: 10.1109/IROS51168.2021.9636630.
End of Presentation
Click the right arrow to return to the beginning of the slide show.
For a downloadable version of this presentation, email: I-SENSE@FAU.