E-Scooter Mobility Sensing for Smart City Public Safety and Asset Management
By Ethan Thomas
Presenter: Ethan Thomas, Computer Science Department, Columbia University School of Engineering and Applied Sciences
REU Mentor: Jinwoo Jang, Ph.D., Florida Atlantic University
Background
- Incorporates the Center for Smart Streetscapes' Situational Awareness thrust.
- Roads and sidewalks are essential for connecting people.
- Bumpy riding surfaces are unsafe, especially at high speeds and in adverse weather conditions.
- Smooth surfaces reduce accident risk for wheelchairs, strollers, scooters, etc.
- How do we quantify and classify these surfaces?
Objective
- Use accelerometers on e-scooters to classify riding surface types.
- Applications include detection of surfaces for unsafe ride prevention.
- Riding surfaces in poor conditions can be reported for maintenance.
System Design
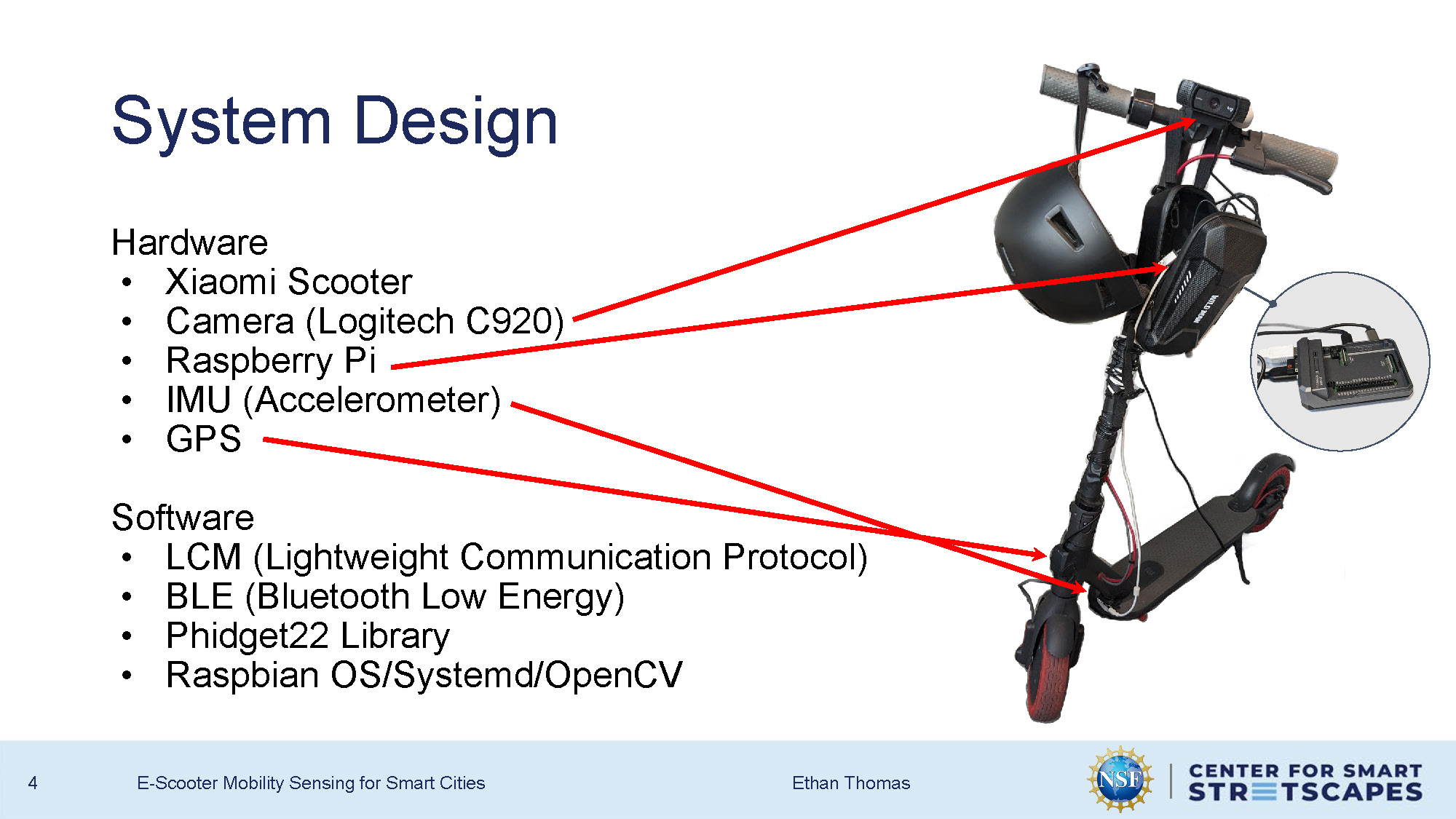
Hardware
- Xiaomi Scooter
- Camera (Logitech C920)
- Raspberry Pi
- IMU (Accelerometer)
- GPS
Software
- LCM (Lightweight Communication Protocol)
- BLE (Bluetooth Low Energy)
- Phidget22 Library
- Raspbian OS/Systemd/OpenCV
Data Collection
Graph showing accelerometer data for different surface types:
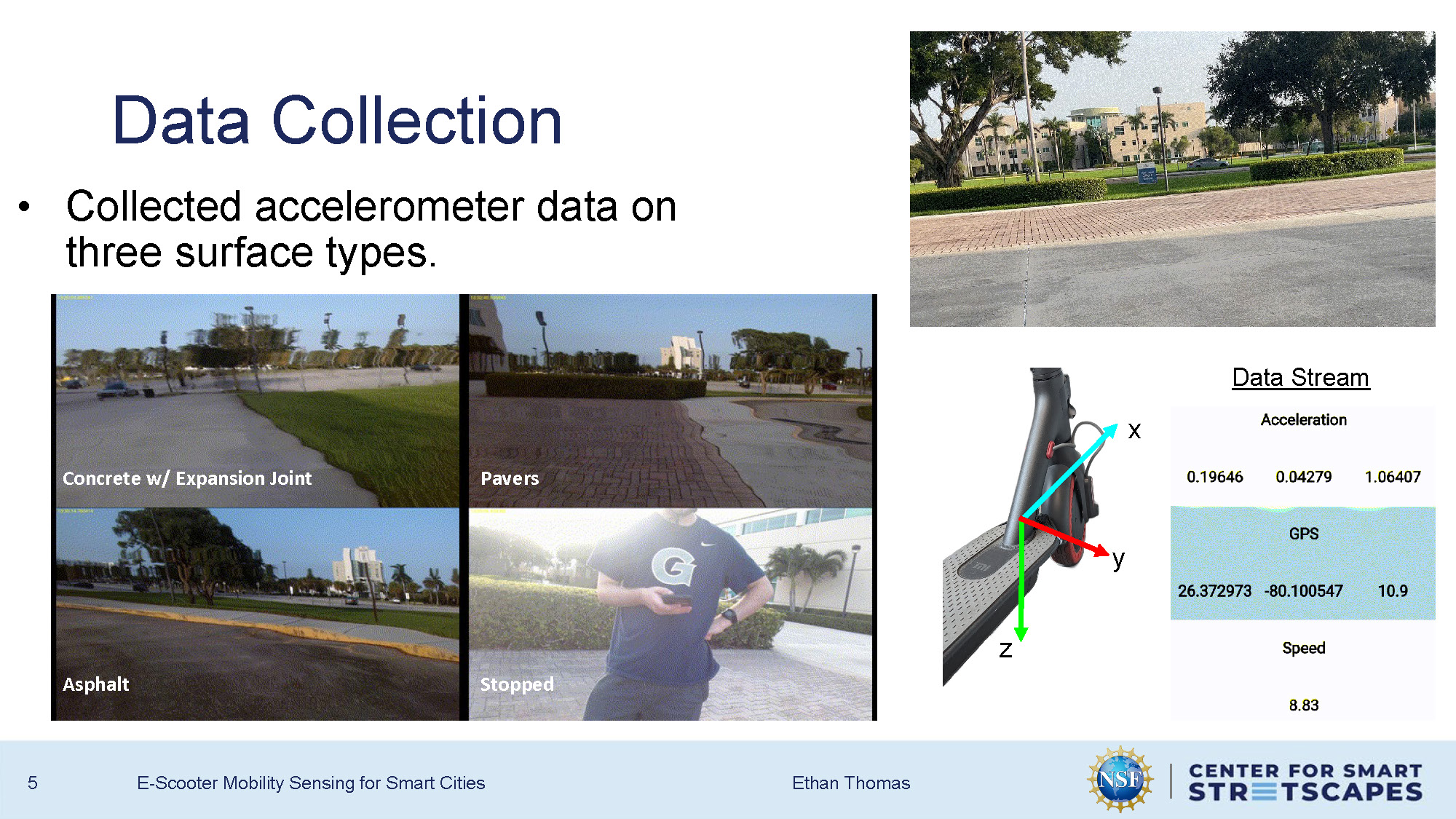
Collected accelerometer data on three surface types.
- Concrete w/ Expansion Joint
- Asphalt
- Pavers
- Stopped
Data Stream
Acceleration
0.19646, 0.04279, 1.06407
GPS
26.372973, -80.100547, 10.9
Speed
8.83
Data Processing
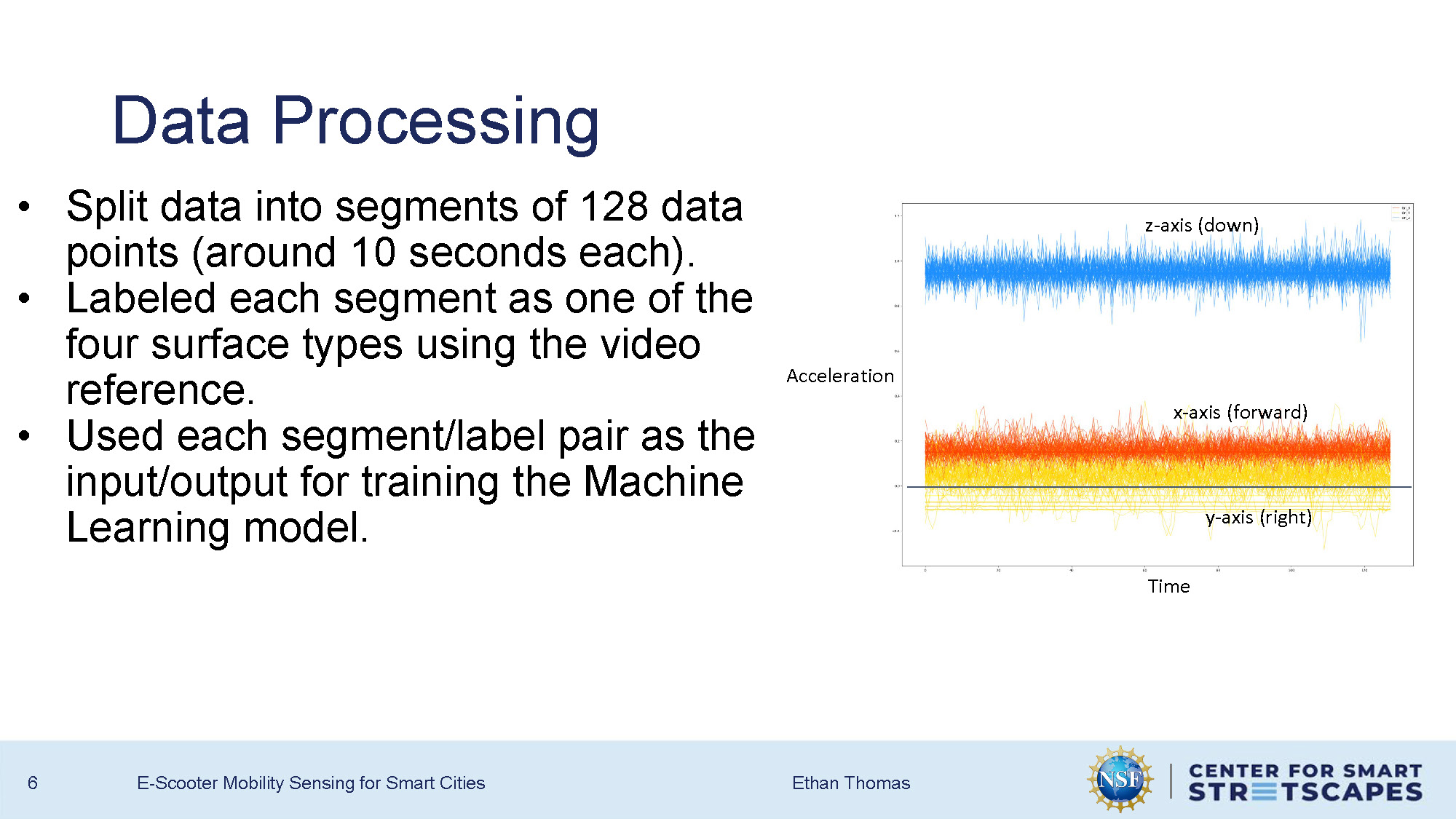
- Split data into segments of 128 data points (around 10 seconds each).
- Labeled each segment as one of the four surface types using the video reference.
- Used each segment/label pair as the input/output for training the Machine Learning model.
Graph shows Time vs Acceleration with z-axis (down) and x-axis (forward) and y-axis (right) measurements.
Machine Learning
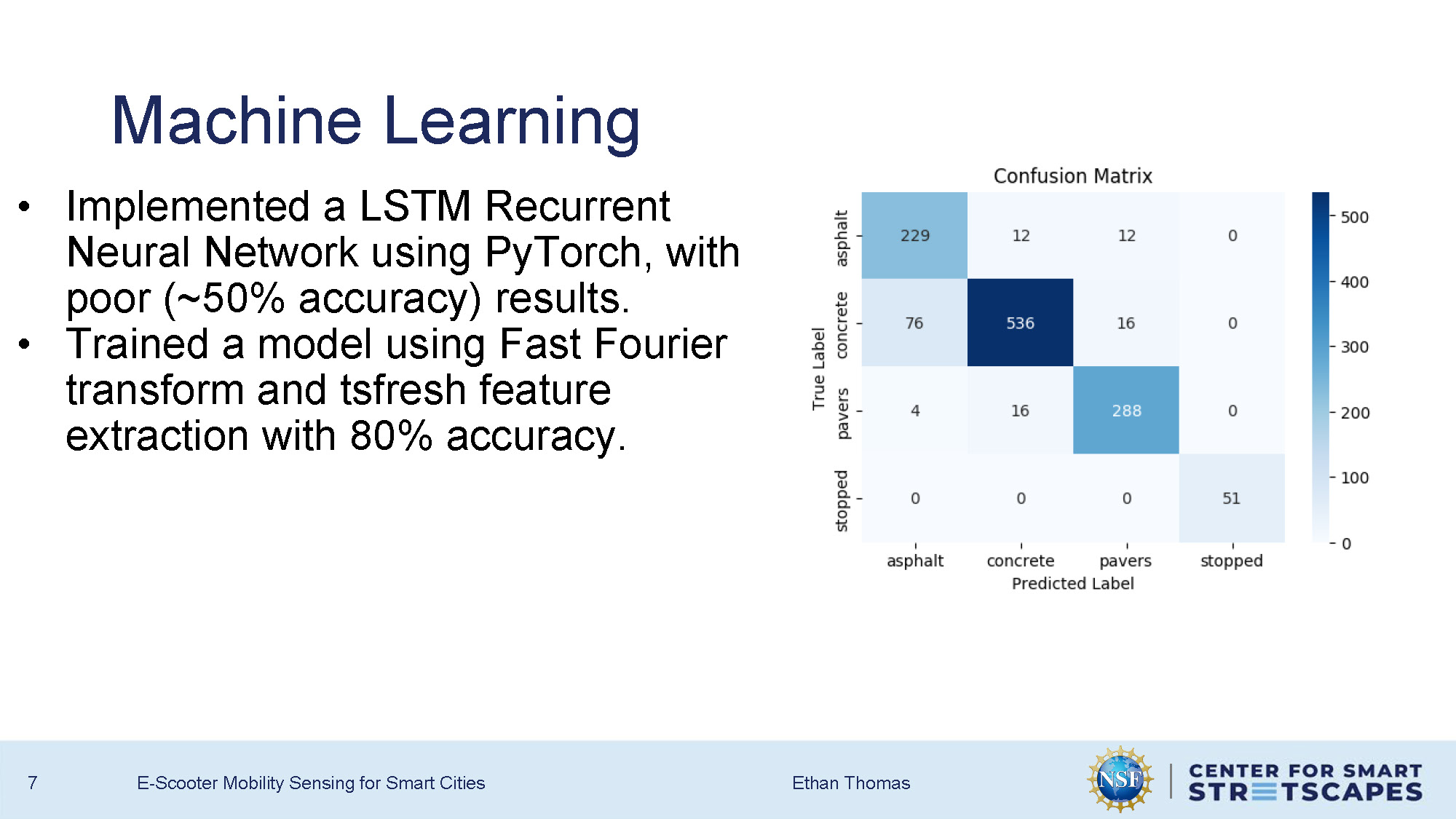
- Implemented a LSTM Recurrent Neural Network using PyTorch, with poor (~50% accuracy) results.
- Trained a model using Fast Fourier transform and tsfresh feature extraction with 80% accuracy.
Conclusions
- Prepared e-scooter for data collection using IoT devices.
- Collected over three hours of data on different surface types.
- Applied Machine Learning models to the collected data.
Future Work
- More data collection on more varied surfaces.
- Put GPS data, and potentially speed data, to use.
- Fine-tune machine learning model for greater accuracy.
- Equip the Raspberry Pi to run the model in real-time.
Questions & Feedback
End of Presentation
Click the right arrow to return to the beginning of the slide show.
For a downloadable version of this presentation, email: I-SENSE@FAU.