Development and Applications of Flexible Ferrofluid Magnet Sensors
By Alex Taing
Mentor: Erik Engeberg, Ph.D.
What is a Flexible Magnet Sensor (FMS)?
Concept
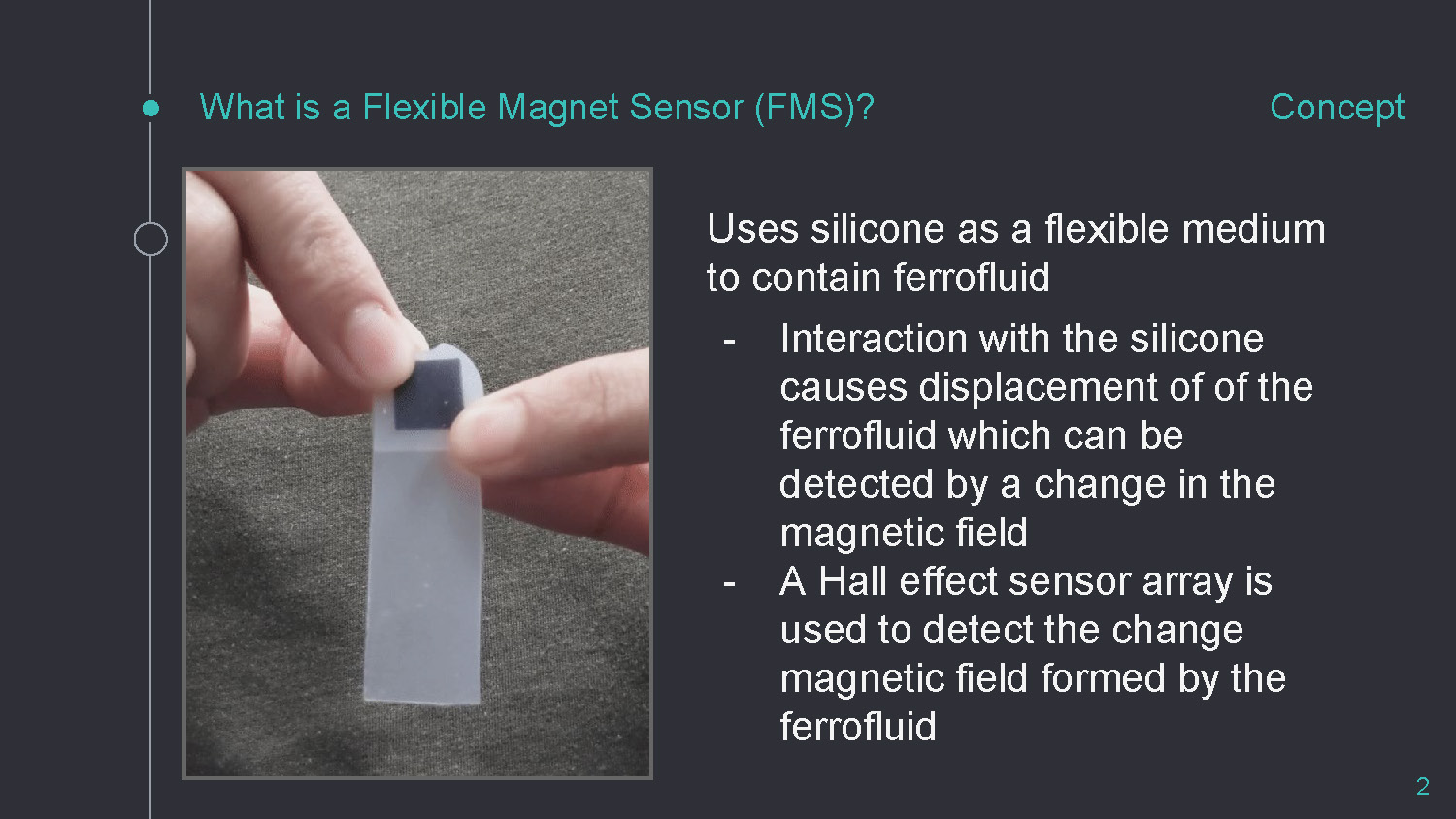
Uses silicone as a flexible medium to contain ferrofluid
- Interaction with the silicone causes displacement of of the ferrofluid which can be detected by a change in the magnetic field
- A Hall effect sensor array is used to detect the change magnetic field formed by the ferrofluid
What is a Flexible Magnet Sensor (FMS)?
Application
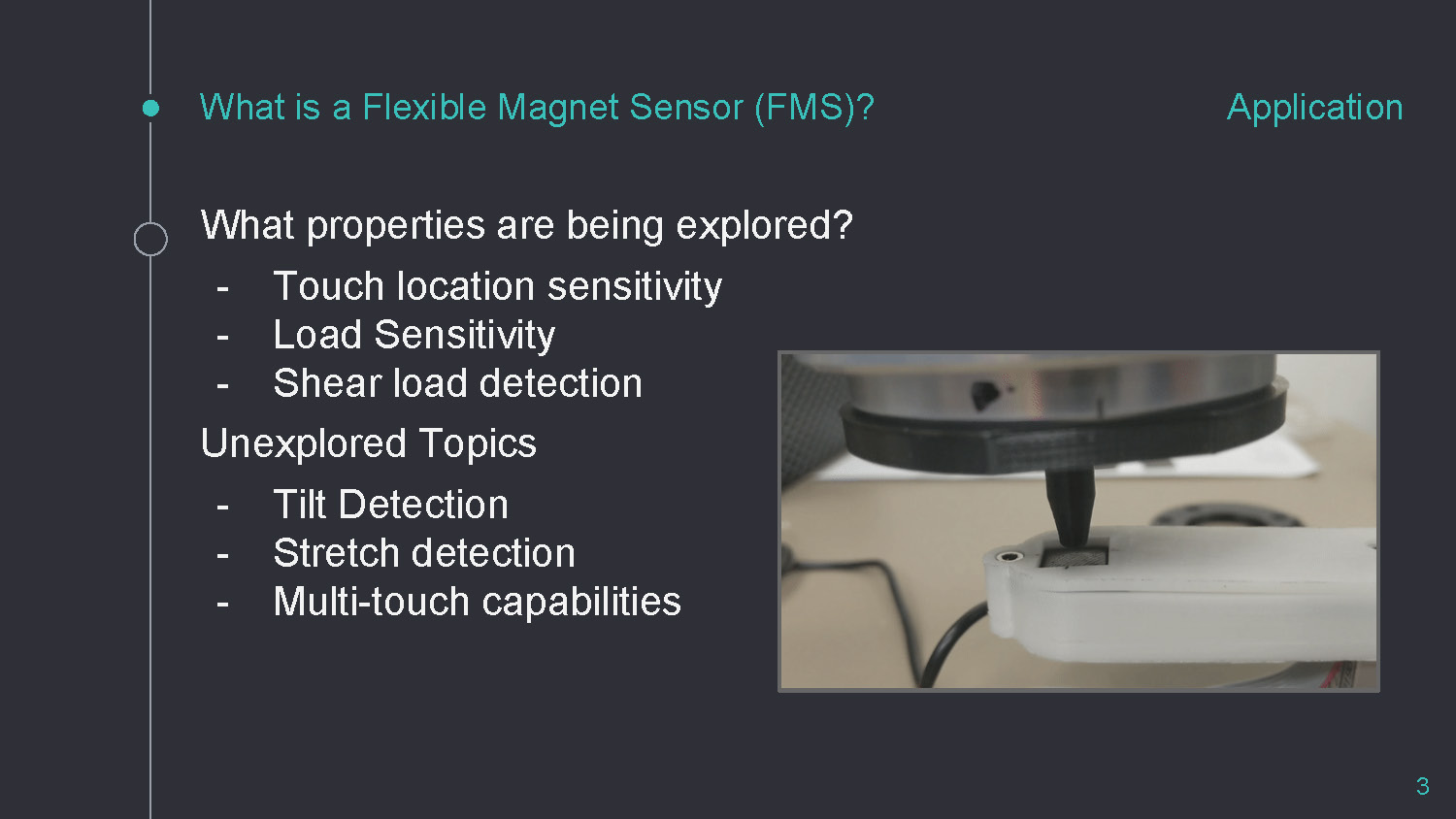
What properties are being explored?
- Touch location sensitivity
- Load Sensitivity
- Shear load detection
Unexplored Topics
- Tilt Detection
- Stretch detection
- Multi-touch capabilities
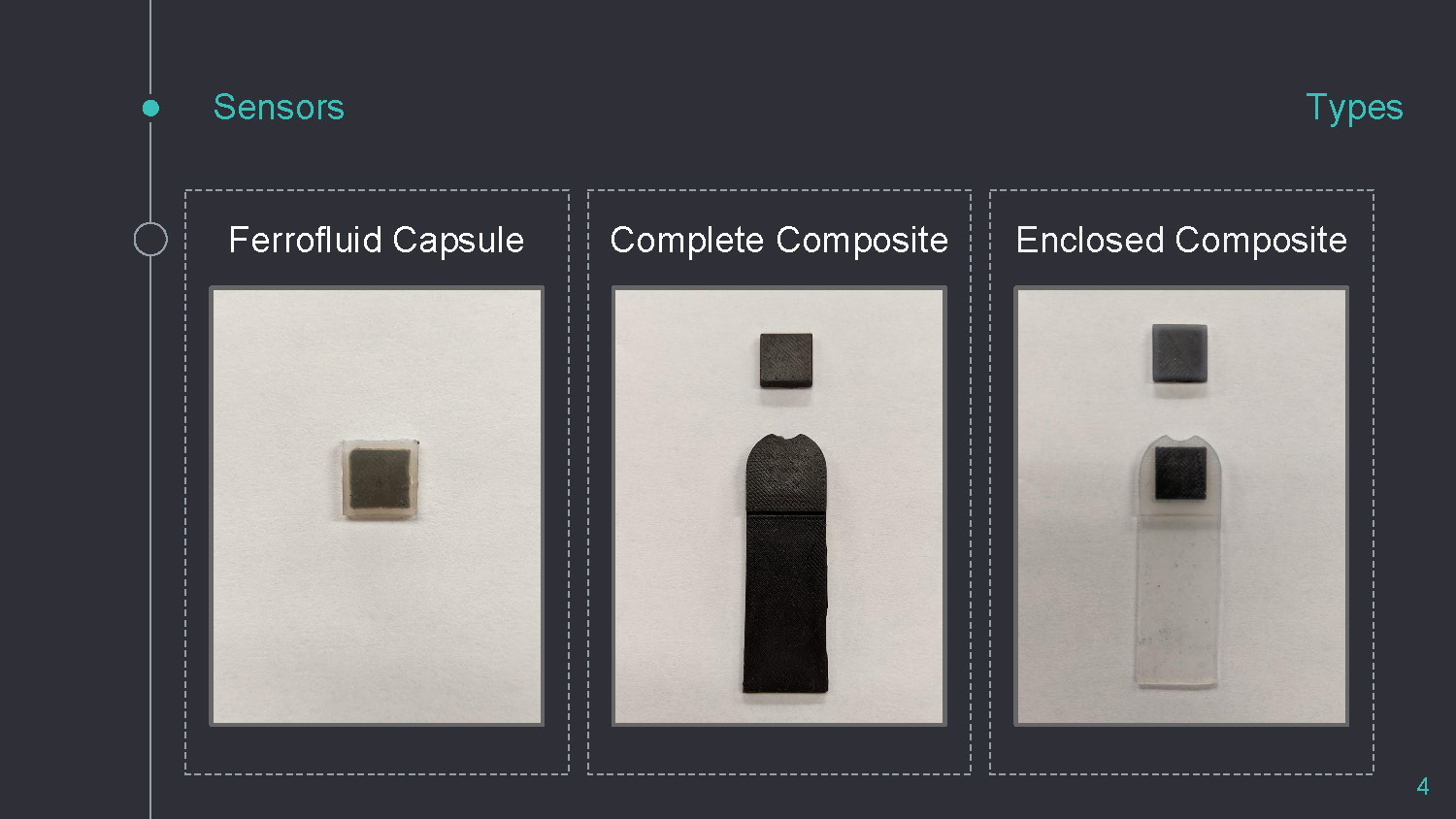
Sensors | Types
Enclosed Composite
Complete Composite
Ferrofluid Capsule
Experiments
Concepts
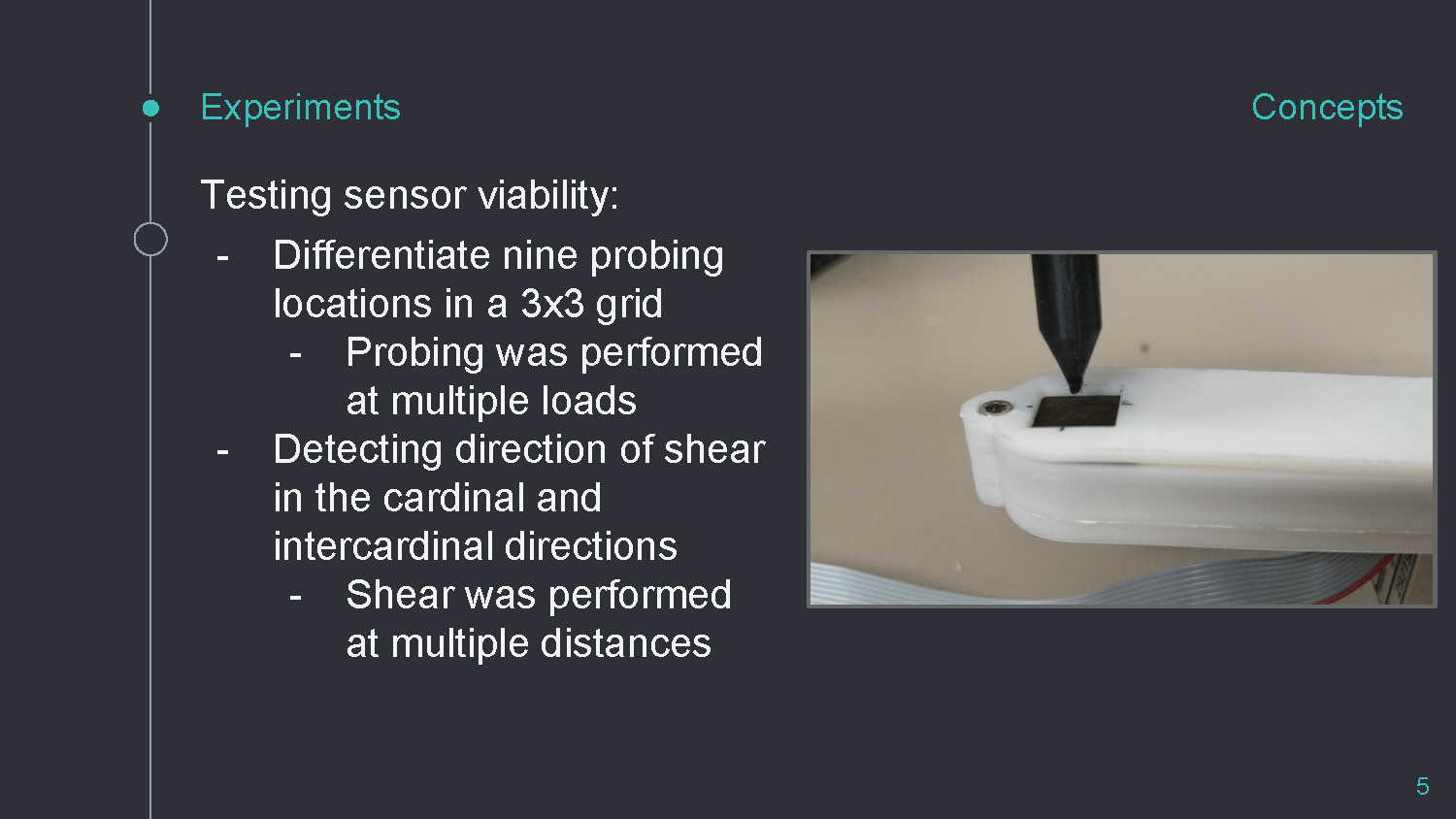
Testing sensor viability:
- Differentiate nine probing locations in a 3x3 grid
- Probing was performed at multiple loads
- Detecting direction of shear in the cardinal and intercardinal directions
- Shear was performed at multiple distances
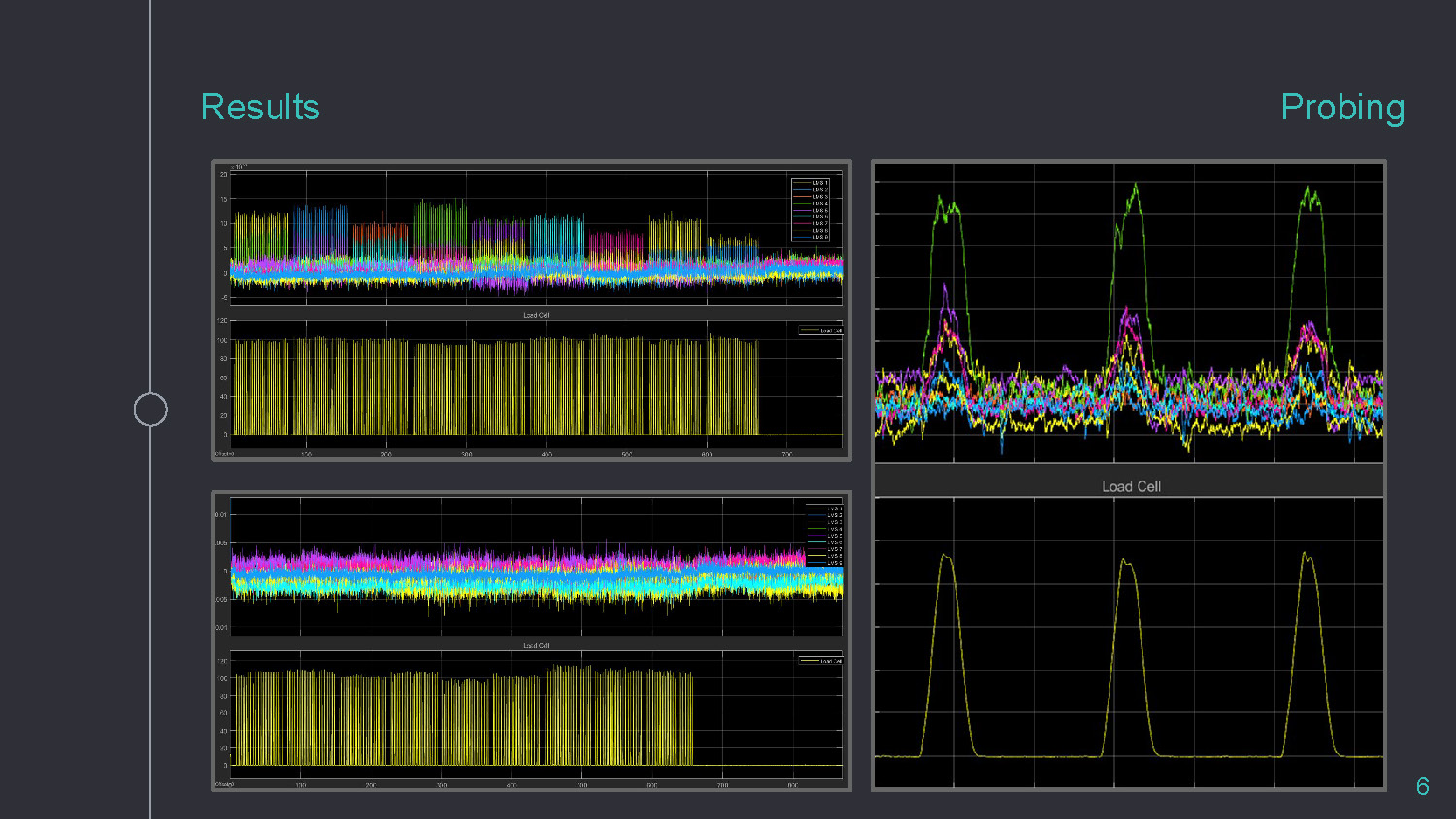
Results | Probing
The slide is divided into four quadrants, each containing a different graph on a black background. The top two graphs show multiple colored lines and a yellow line graph below them. The bottom two graphs are similar, with multiple colored lines on top and a yellow line graph below. The yellow line graphs show peaks and valleys. All graphs have a black background and thin white grid lines.
Neural Networks | ANN
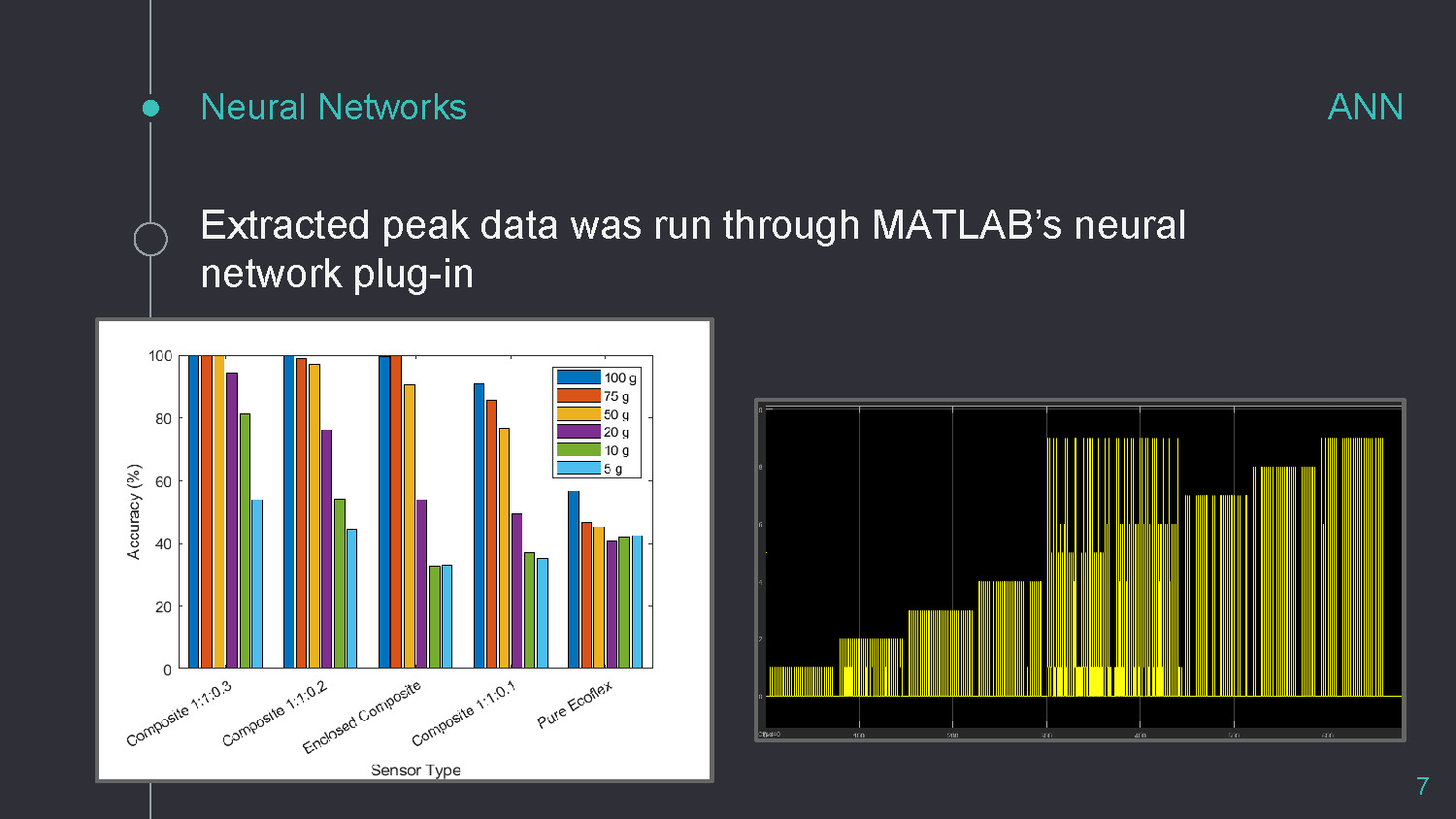
Extracted peak data was run through MATLAB's neural network plug-in
The slide displays two charts: a bar chart on the left and a yellow line graph on the right. The bar chart's x-axis is labeled "Sensor Type," and the y-axis is "Accuracy (%)". The chart contains several sets of colored bars, with a legend in the top-right corner indicating weights from 100g to 5g. The line graph on the right shows a series of vertical yellow lines with varying heights on a black background.

Future Work
The slide shows a close-up photograph of a light green 3D-printed object. The object, which appears to be a replica of a spine, is compressed between a large gray metal cylinder on top and a flat green base on the bottom. Two nuts and bolts are visible on the base to the right of the object.
References
Almansouri, A. S., Alsharif, N. A., Khan, M. A., Swanepoel, L., Kaidarova, A., Salama, K. N., & Kosel, J. (2019). An Imperceptible Magnetic Skin. Advanced Materials Technologies, 4(10), 1900493. https://doi.org/10.1002/admt.201900493
Hao, J., Nangunoori, R., Wu, Y. Y., Rajaraman, M., Cook, D., Yu, A., Cheng, B., & Shimada, K. (2018). Material characterization and selection for 3D-printed spine models. 3D Printing in Medicine, 4(1), 8. https://doi.org/10.1186/s41205-018-0032-9
Hook, J., Taylor, S., Butler, A., Villar, N., & Izadi, S. (2009). A reconfigurable ferromagnetic input device. Proceedings of the 22nd Annual ACM Symposium on User Interface Software and Technology - UIST '09, 51. https://doi.org/10.1145/1622176.1622186
Kaidarova, B. A., Liu, W., Swanepoel, L., Almansouri, A., Geraldi, N. R., Duarte, C. M., & Kosel, J. (2021). Flexible Hall sensor made of laser-scribed graphene. Npj Flexible Electronics, 5(1), 1–7. https://doi.org/10.1038/s41528-021-00100-4
Mohammadi, A., Xu, Y., Tan, Y., Choong, P., & Oetomo, D. (2019). Magnetic-based Soft Tactile Sensors with Deformable Continuous Force Transfer Medium for Resolving Contact Locations in Robotic Grasping and Manipulation. Sensors, 19(22), 4925. https://doi.org/10.3390/s19224925
Ozioko, O., Karipoth, P., Escobedo, P., Ntagios, M., Pullanchiyodan, A., & Dahiya, R. (2021). SensAct: The Soft and Squishy Tactile Sensor with Integrated Flexible Actuator. Advanced Intelligent Systems, 3(3), 1900145. https://doi.org/10.1002/aisy.201900145
End of Presentation
Click the right arrow to return to the beginning of the slide show.
For a downloadable version of this presentation, email: I-SENSE@FAU.