Deep Neural Networks for Rapid Fault Detection in Marine Hydrokinetic Turbines
Presented by Sean Passmore
The Problem
- MHK has a high Levelized Cost of Energy (LCOE)
- LCOE for MHK is approximately 18% Operations and Maintenance (O&M)
- O&M cost reduction with Neural Networks can increase MHK viability
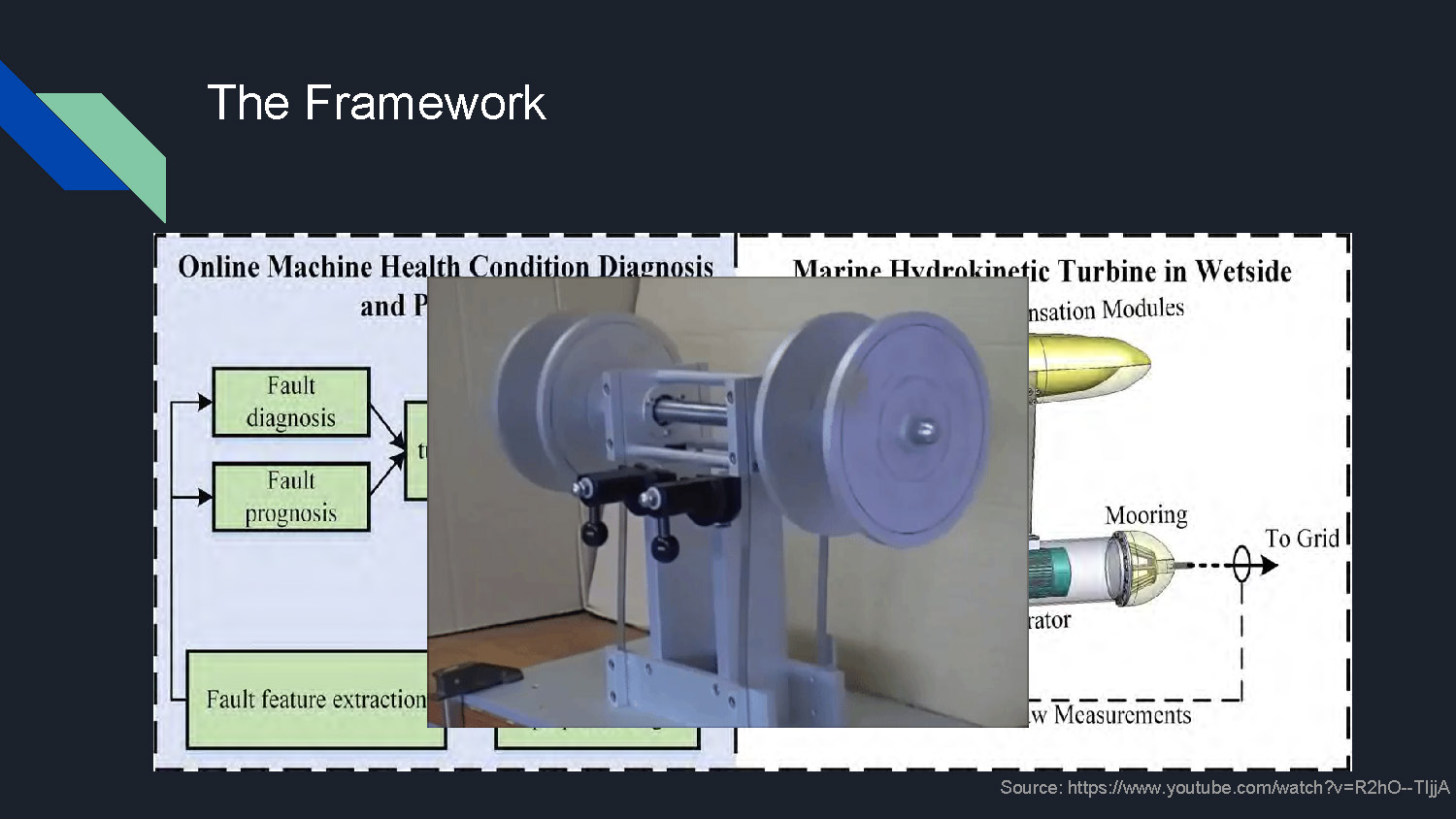
The Framework
Source: https://www.youtube.com/watch?v=R2hO--TIjjA
The framework diagram illustrates the system architecture for implementing deep neural networks in marine hydrokinetic turbine fault detection.
The Solution
Traditional Methods
- Use hand-designed features
- Require significant domain knowledge
- Generalize poorly to other domains
Deep Learning
- Automatic feature extraction
- Independent of need for prior knowledge
- Higher generalization ability
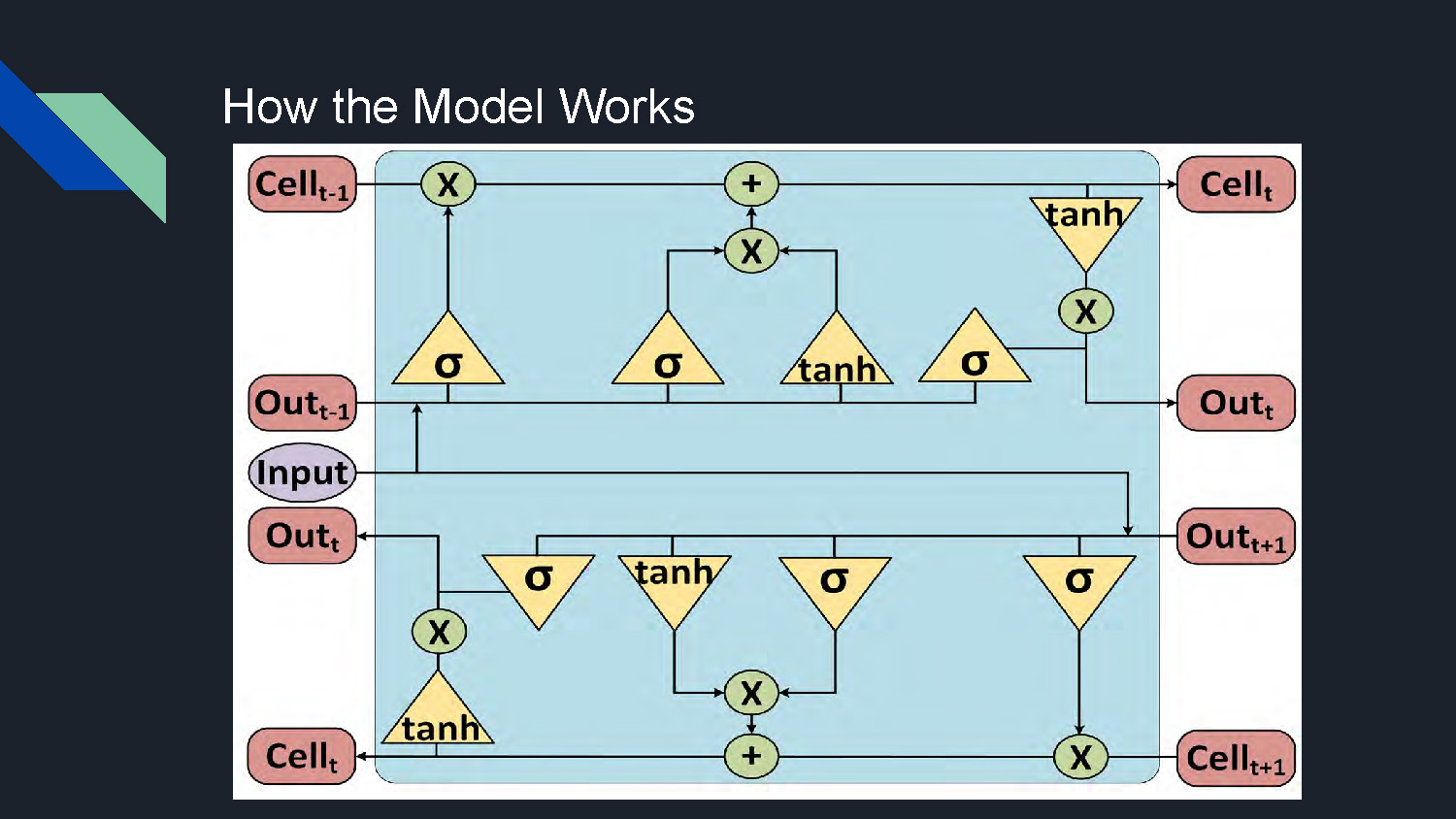
How the Model Works
This slide presents a visual diagram of the deep learning model architecture, showing the data flow and processing stages for fault detection in marine hydrokinetic turbines.
Experimental Design
- Important to find both the best training sequence length
- Important to find best training fault
- Find the best combination of both
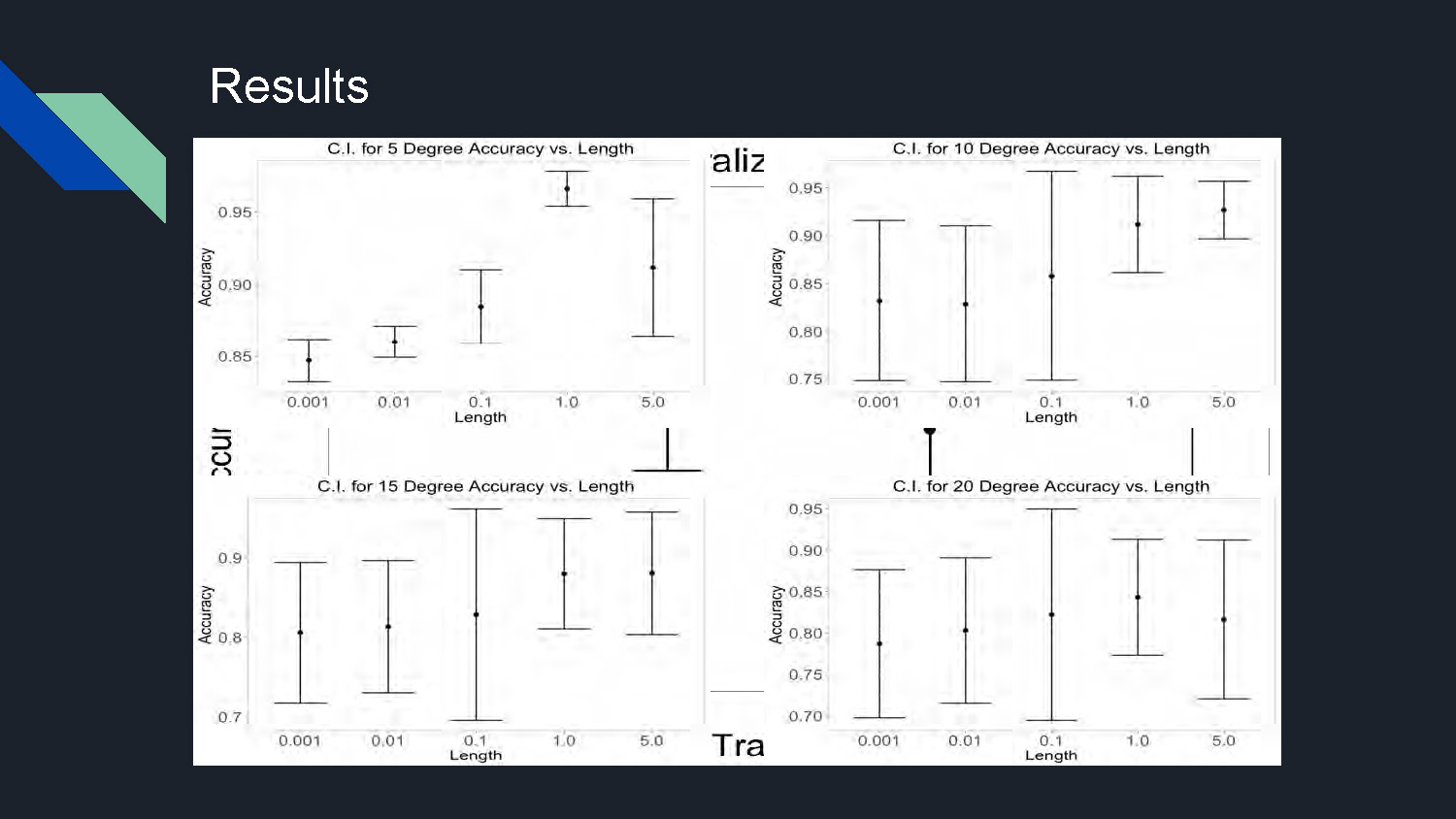
Results
This slide presents the experimental results and performance metrics of the deep neural network model for fault detection in marine hydrokinetic turbines.
Conclusions
- 1 second of data provides the best accuracy
- 5 degrees is the best fault to train on
- Bi-LSTM creates a robust feature space resilient to noise
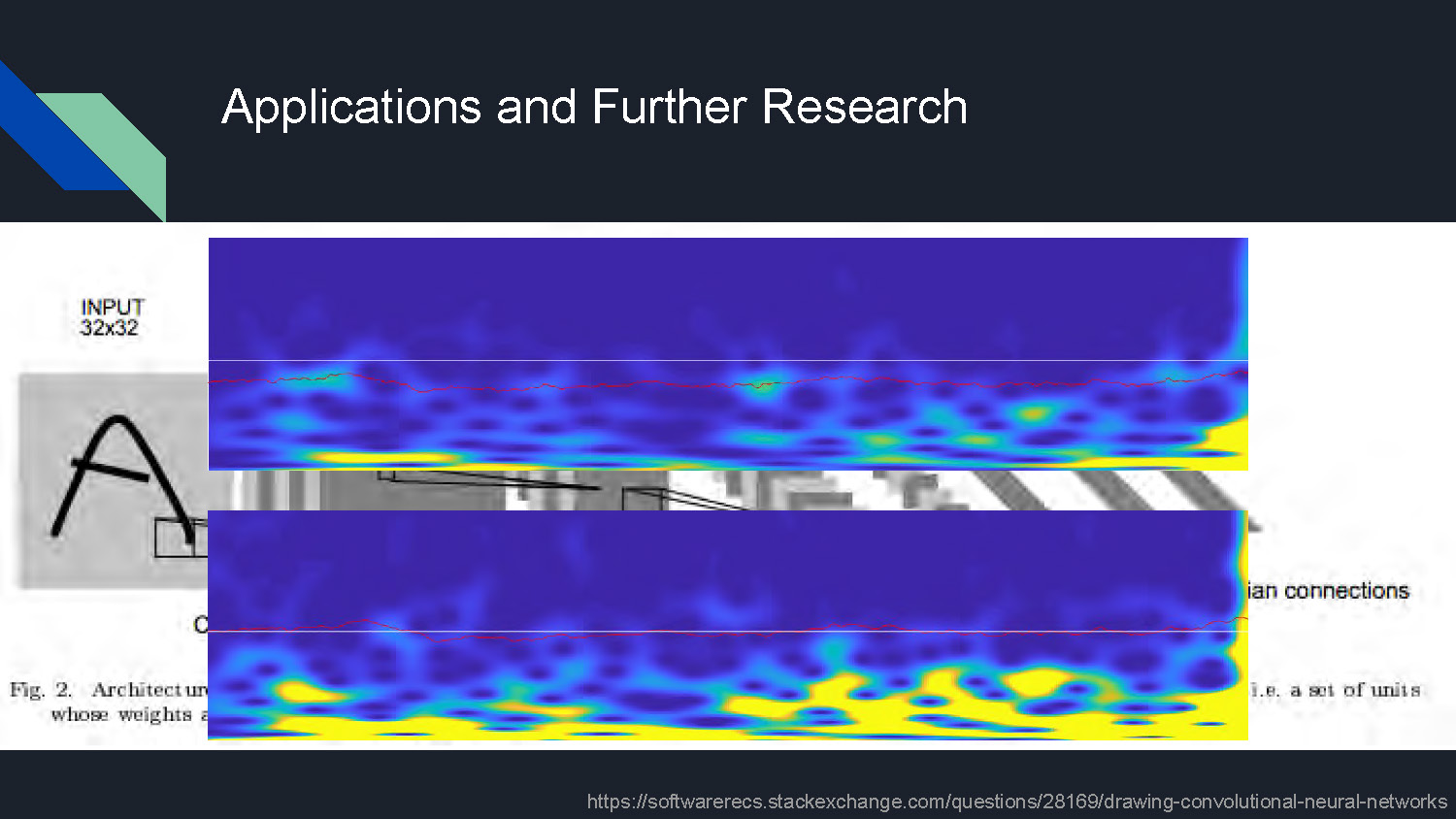
Applications and Further Research
Reference: https://softwarerecs.stackexchange.com/questions/28169/drawing-convolutional-neural-networks
End of Presentation
Click the right arrow to return to the beginning of the slide show.
For a downloadable version of this presentation, email: I-SENSE@FAU.