Data Sensing with Mobile Vehicles
Presenter: Jordan Miller
Advisor: Dr. Jinwoo Jang

Self Driving Cars
The slide features an image of an autonomous vehicle to illustrate the technology being discussed.
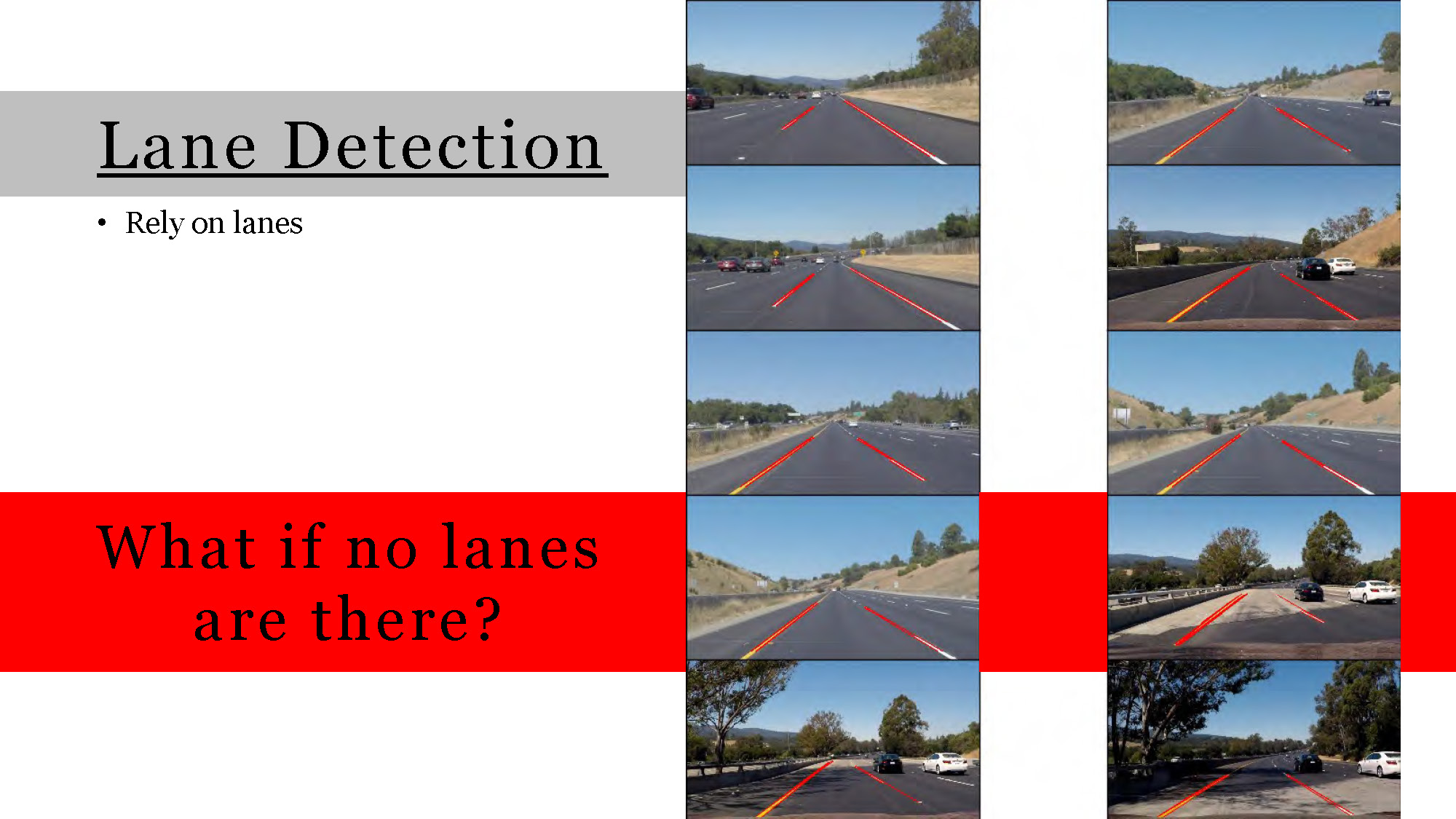
Lane Detection
• Rely on lanes
What if no lanes are there?
This slide addresses one of the key challenges in autonomous vehicle navigation: what happens when lane markings are not present or visible. The slide poses the critical question of how self-driving cars can navigate in situations where they cannot rely on traditional lane detection methods.
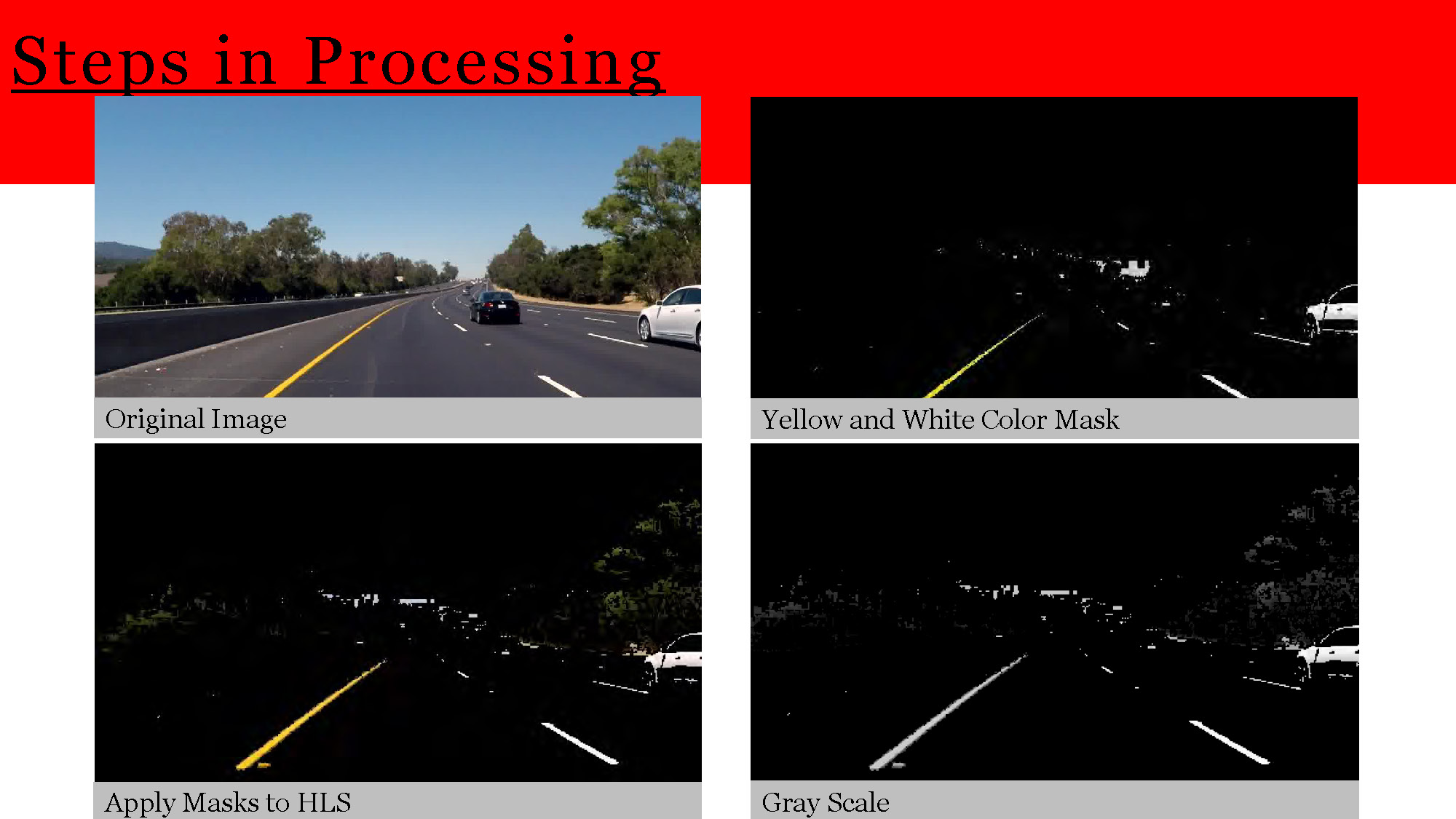
Steps in Processing
The image processing pipeline consists of the following sequential steps:
- Original Image
- Yellow and White Color Mask
- Apply Masks to HLS
- Gray Scale
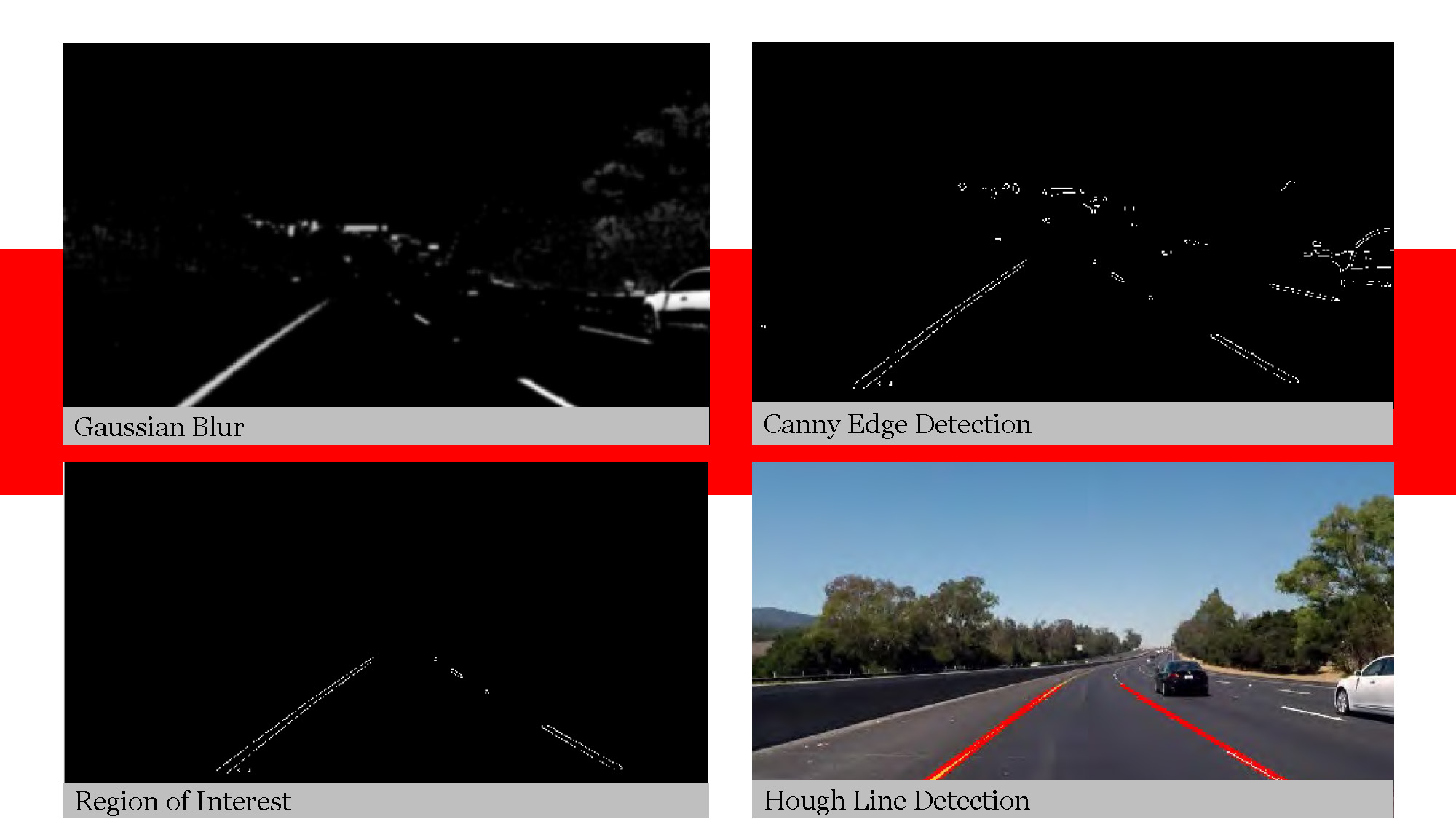
Steps in Processing (continued)
- Gaussian Blur
- Canny Edge Detection
- Region of Interest
- Hough Line Detection

Steps in Processing (continued)
- Draw Lines
How about real-time?
Conclusions
- Internet of Things
- Lane Detection
- Improve the algorithm
- Incorporate GPS

Questions?
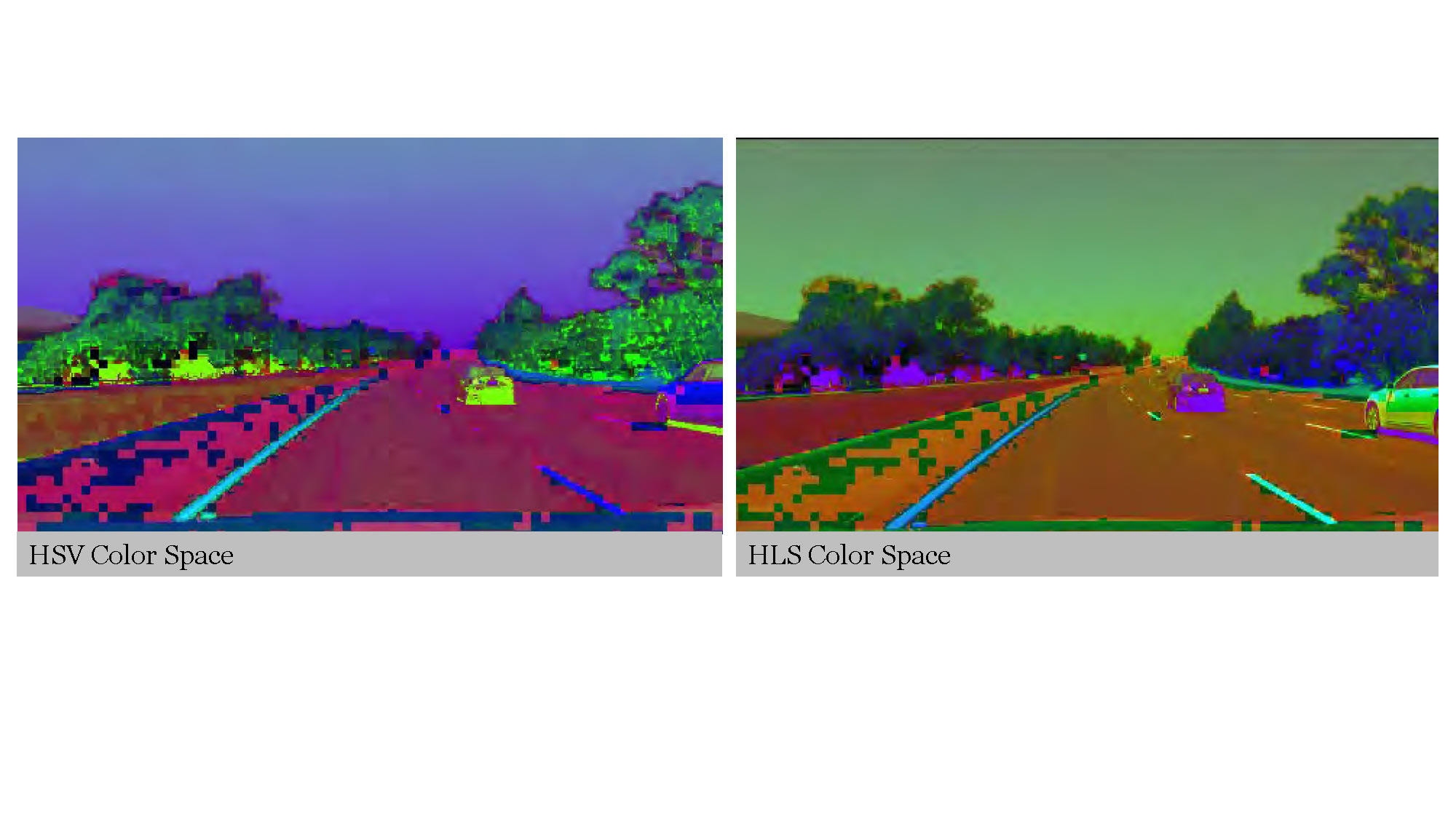
Color Spaces
HSV Color Space
HLS Color Space
End of Presentation
Click the right arrow to return to the beginning of the slide show.
For a downloadable version of this presentation, email: I-SENSE@FAU.