Marine and Environment: Robust Co-Prime Sensing with Underwater Inflatable Passive Sonar Arrays
Led by Bing Ouyang, Ph.D.

Bing Ouyang, Ph.D., joined HBOI/FAU as a Research Associate in 2009. He is one of the 40 recipients of prestigious 2013 Air Force Young Investigator Research Award. He has been PI and co-PI on several other grants and projects. His main research interests include novel compact underwater serial imaging system; underwater imaging lidar noise reduction and image enhancement and computer vision for underwater imaging systems. His 2011 SPIE paper was first reported application of compressive sensing in underwater laser imaging systems. He has a provisional patent application “MEMS Microdisplay Optical Imaging and Sensor System in Scattering Underwater Environment” filed jointly with Fraser Dalgleish, Ph.D., and Anni Vuorenkoski Ph.D. He is also applying for a patent on Compressive Sensing based imaging Lidar. Prior to joining HBOI, Ouyang was with Texas Instruments (TI) between 1996 and 2009. In 2002, he joined TI’s Digital Light Processing (DLP) group as an ASIC algorithm engineer, developing front end algorithm form DLP video processor. He was peer-elected to TI’s Member Group of Technical Staff. He has three patents on video source detection and semiconductor equipment data acquisition system (US Patent 7,825,990, 7,733,424 and 8,112,400) and four pending applications.
A. TECHNICAL OVERVIEW
The overarching goal of the proposed work is to develop a transformative approach for enabling a UUV based underwater deployable hydrophone sensor network (UDSN). The UDSN has many more defense and scientific applications. For marine and hydrokinetic (MHK) full project lifecycle (baseline, commissioning, and decommissioning) observation, acoustic signatures acquired using this network will complement the images acquired using the electro-optical systems to accurately identify the protected animals came close to the MHK sites.
Before the deployment, UDSN nodes will be packed as UDS capsules in the UUV payload bay. The capsules can then be deployed by the UUVs at pre-defined locations. An underwater inflatable co-prime sonar array (UICSA) system forms one UDSN node with the sensors located on the inflatable structures. Once all the UICSA packages morph into the final tube forms, the density of the UDSN sensor network is defined.
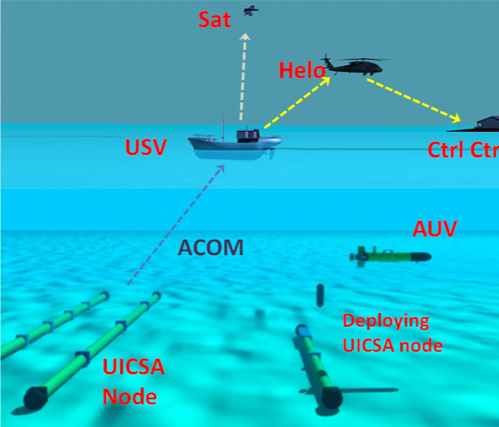
One operational scenario is illustrated in Figure 1. An autonomous underwater vehicle (AUV) carries folded UDSN capsules and drops these on the sea floor at predefined distances based on the UDSN density requirements, the environmental conditions, and the platform velocity. Once the package lands on the seabed, the anchors can be deployed from the sealing ends and fold tie will be released. Then, the underwater pump starts to inflate the structure. The folded package element will eventually deform into a tube shape. The fully inflated structure is shown in the bottom left of Figure 1, the structure that is in the inflation process is in the lower-middle, and the folded package itself is presented in the bottom right section of Figure 1. The data measurements can be sent to a USV, e.g. WaveGlider, transacting around the region via acoustic communication (ACOM). The USV can then forward the data to the command center through a satellite link or an aerial platform.
B. PROJECT OBJECTIVES
The objective of the project aims at developing one UDSN node – to design and construct one UICSA prototype and demonstrate the feasibility of the system in a test tank environment. The outcome of this project should provide the foundation for future endeavors to investigate the UDSN for large area surveillance, both the structure deployment and signal processing algorithm development.
C. TASKS TO BE PERFORMED
Under the supervision of HBOI faculty and research associate, the student will work on the construction of an underwater inflatable co-prime sonar array (UICSA) prototype. The main task is to design a compact data logger for the UICSA prototype. Leveraging the progress in the low-power embedded platforms such as Arduino and Raspberry Pi, we will develop a more compact data logger that can be used in the experimental study of the UICSA prototype. The off-the-shelf data logger used in the current UICSA experimental study is bulky and has limited connectivity. We will conduct functional baseline and requirements analysis, and detailed analyses of operational requirements will be completed. A preliminary design review (PDR) will be conducted. Following PDR, subsystem level specification and design will be conducted. A critical design review (CDR) will be conducted after the subsystem and component level design.
Following CDR, the embedded system will be developed and integrated with ADC to realize the data logger electronic subsystem. The data logger will then be interfaced with hydrophone to be tested in the dry environment. The data logger will then be placed inside a soft-matter housing and integrated with the UICSA prototype for testing in the HBOI optical test tank or OME acoustic test facility.